

Wall-climbing type shot blasting robot
A technology for robots and robot bodies, applied in the field of robots, can solve problems such as low efficiency, and achieve the effects of simple structure design, efficient paint removal and rust removal
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
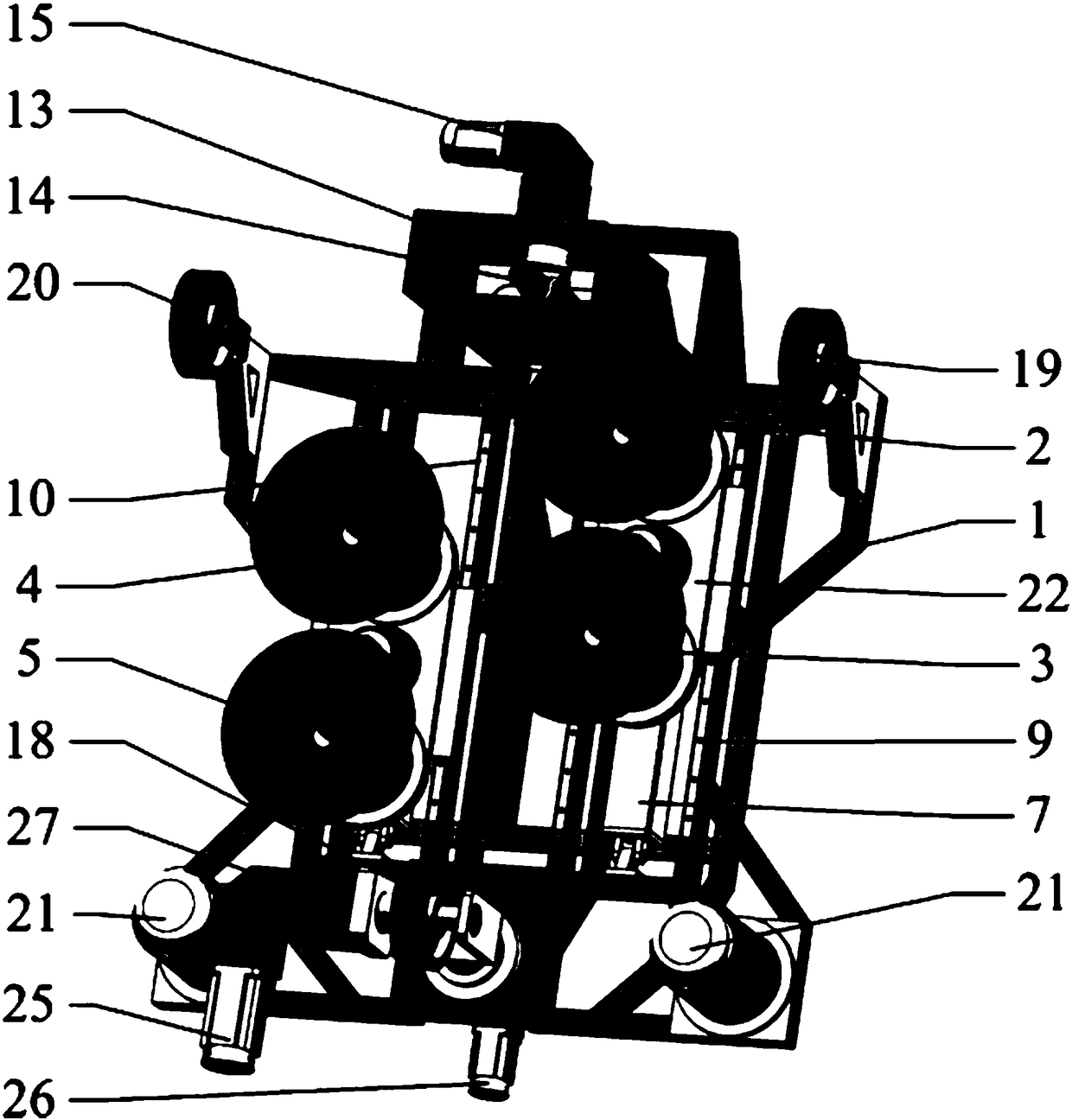
[0053] Embodiment: combine below Figure 1 to Figure 5 This embodiment will be described in detail.
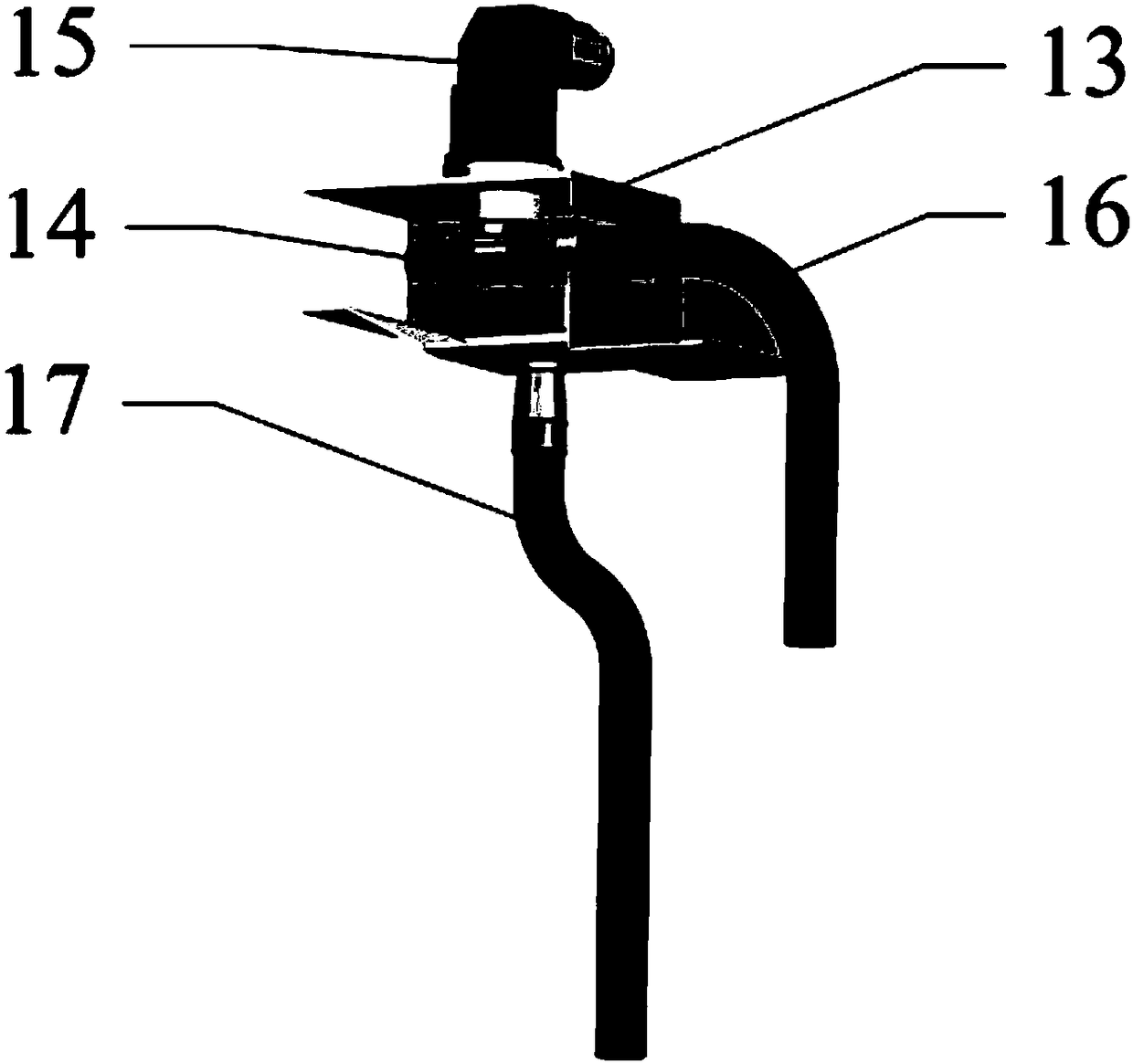
[0054] The wall-climbing type shot-peening robot described in this embodiment comprises a wall-climbing type shot-peening robot body, and the wall-climbing type shot-peening robot body includes a frame 1, a walking mechanism and a shot-peening mechanism;
[0055] The walking mechanism includes a wheeled walking unit and a negative pressure adsorption unit;
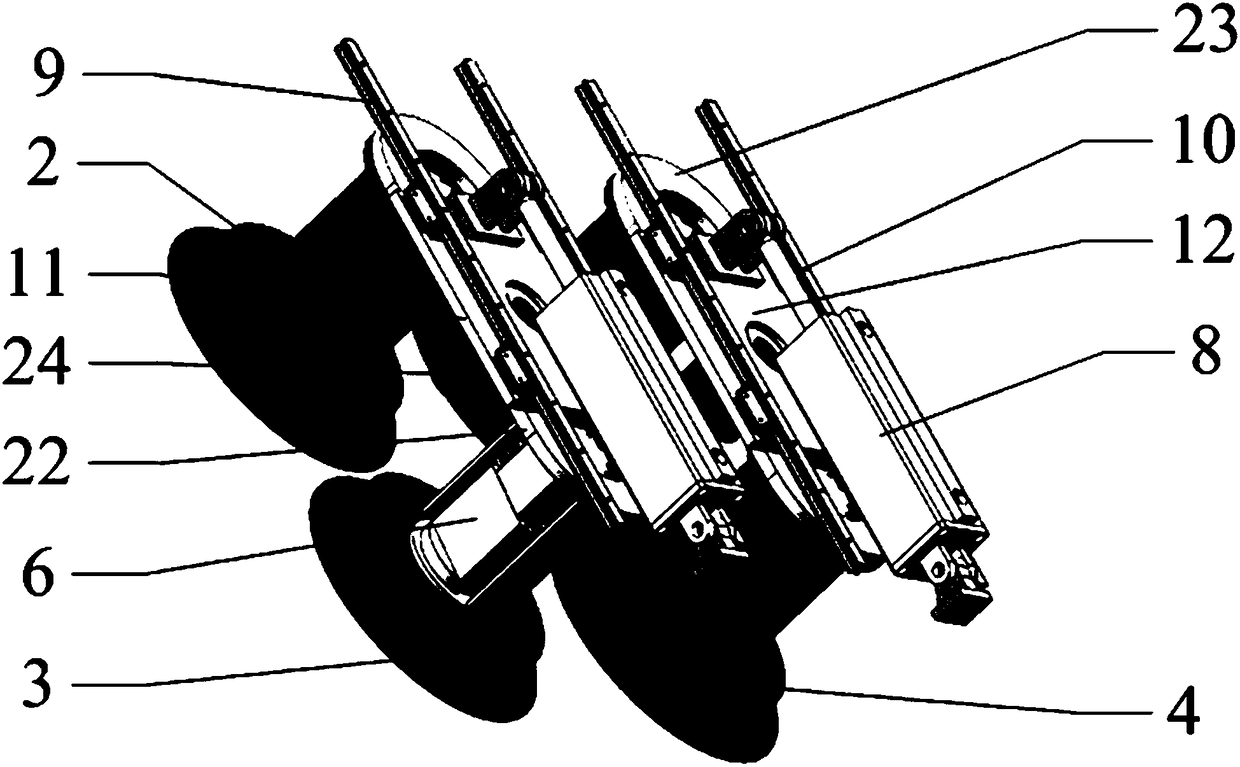
[0056] The negative pressure adsorption unit includes a first vacuum chuck 2, a second vacuum chuck 3, a third vacuum chuck 4, a fourth vacuum chuck 5, a first cylinder, a second cylinder 6, a third cylinder, a fourth cylinder, and a fifth cylinder 7 , the sixth cylinder 8, the first vacuum pump, the first air pump, the first linear guide 9, the second linear guide 10, the first slide 11 and the second slide 12;
[0057]The first linear guide 9 and the second linear guide 10 are arranged side by side on the bottom surfac...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More