

Sanitation robot used for garbage can carrying and unloading and control method thereof
A control method and technology of garbage bins, applied in the direction of loading/unloading, manipulators, conveyors, etc., can solve the problems of untimely replacement of garbage bins, and achieve the effect of solving untimely cleaning, reducing production costs, and strong applicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment approach
[0066] In order to further illustrate the technical scheme of the present invention, in conjunction with the accompanying drawings, the specific implementation of the present invention is as follows:
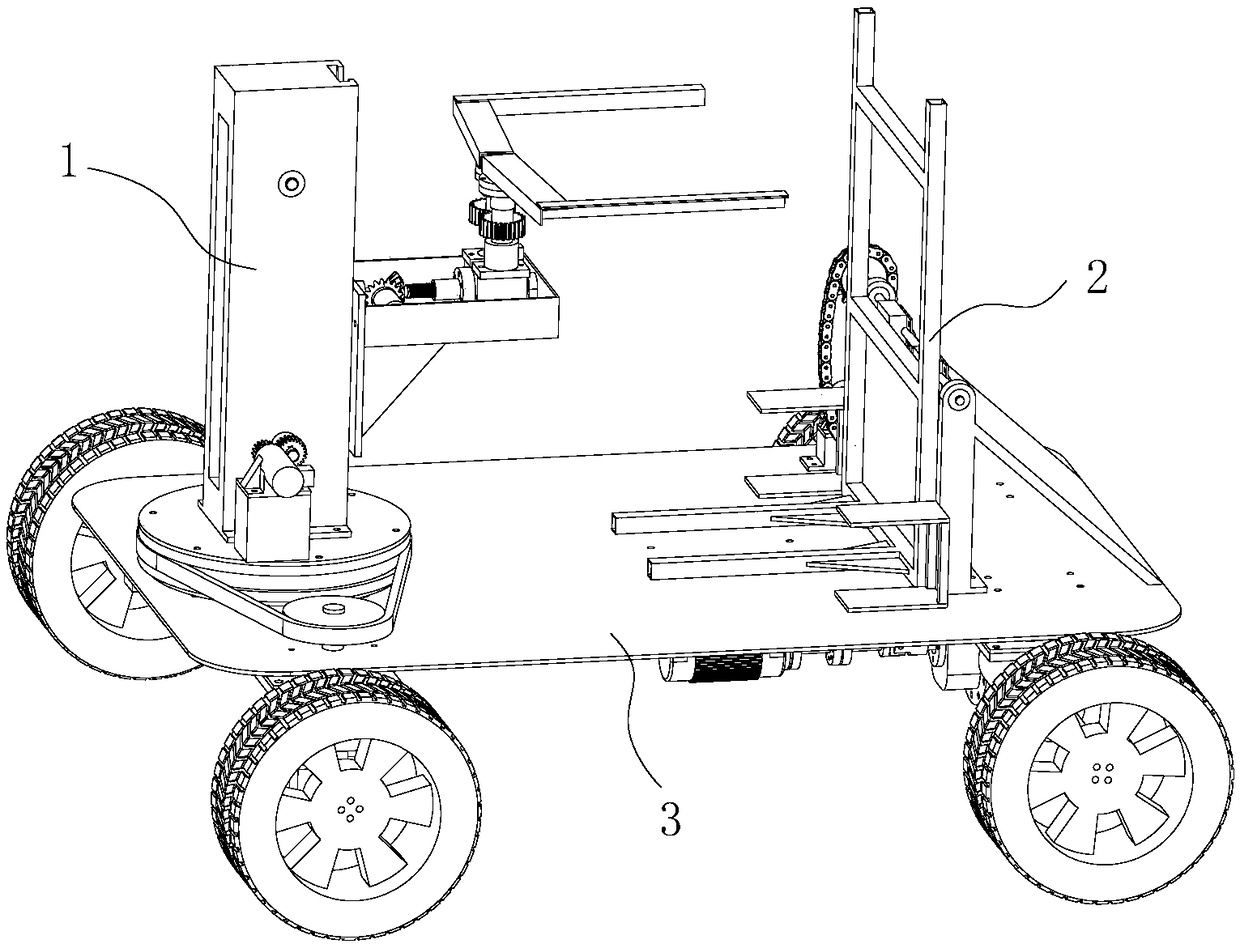
[0067] Such as figure 1 As shown, the present invention discloses a sanitation robot for transporting and unloading garbage bins, which is composed of a rotatable grasping mechanism 1, a dumping mechanism 2 and a chassis 3. The rotatable grasping mechanism 1 is rotatably installed at the front end of the chassis 3, and the tilting mechanism 2 is fixedly installed at the rear end of the chassis 3. The chassis 3 is used to transport the sanitation robot to a designated position, the rotatable grasping mechanism 1 is used to grasp the waste bin and place the waste bin in a designated position, and the dumping mechanism 2 is used to transport Trash dumped and unloaded.
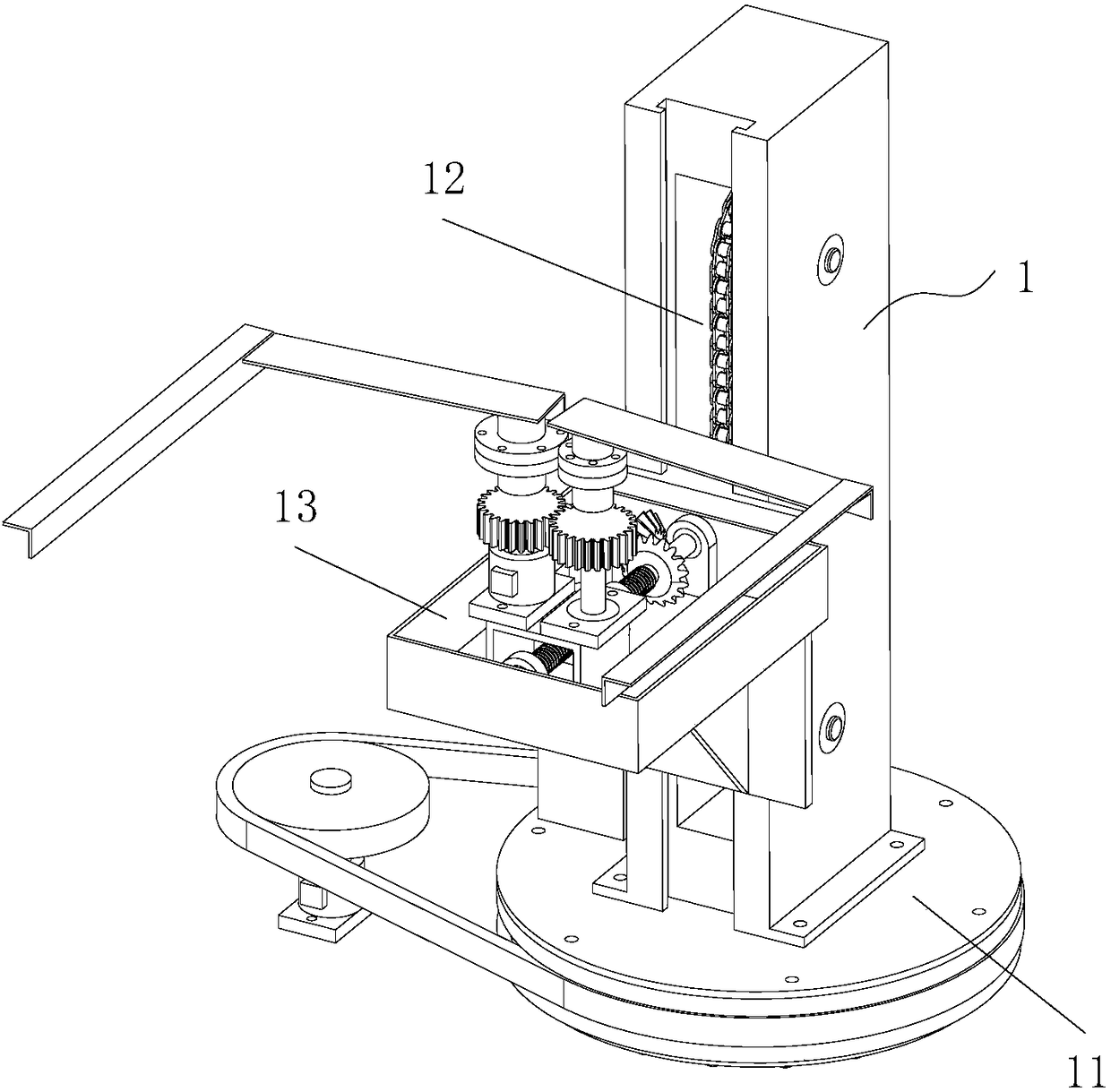
[0068] Such as figure 2 As shown, the rotatable grasping mechanism 1 is composed of a rotating mechanism 11, a lifti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More