

Robot logistics carrying system and method based on Bluetooth base station positioning and scheduling
A technology of logistics handling and robots, applied in the field of logistics, can solve the problems of low scope of application and inability of robots to cooperate with handling, and achieve the effect of increasing the scope of application, improving stability and efficiency, and improving the accuracy of handling
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
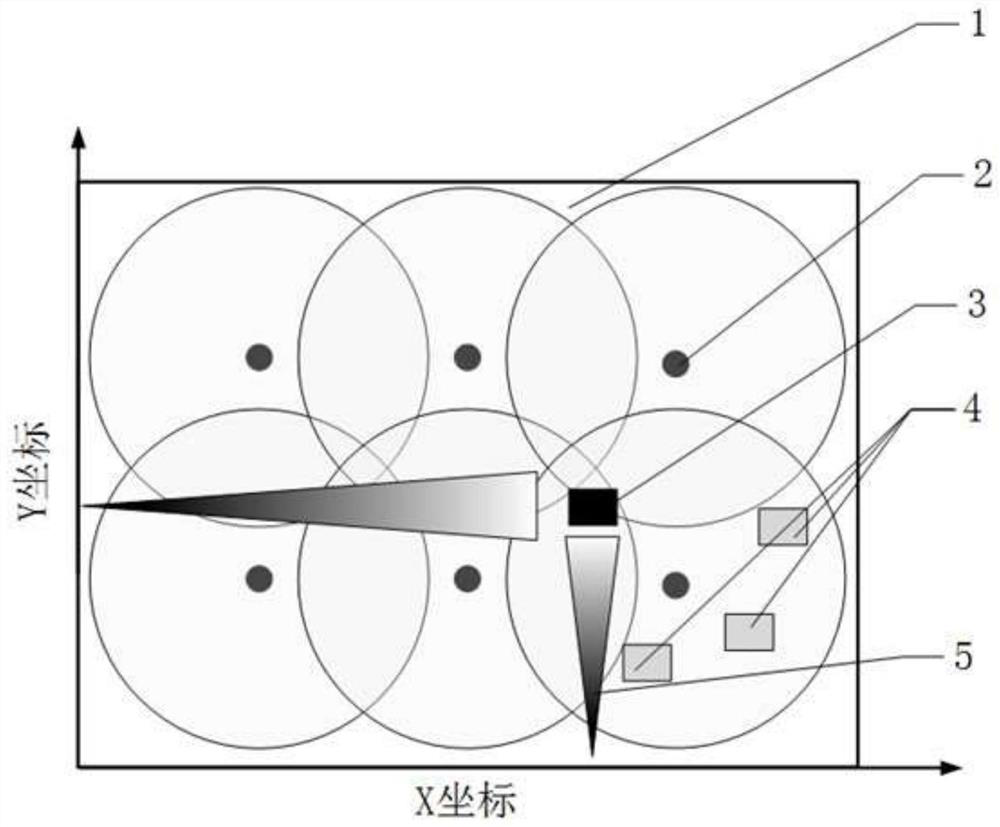
[0068] like figure 1 As shown, one embodiment of the present invention is a robot logistics handling system based on Bluetooth base station positioning and scheduling, including:
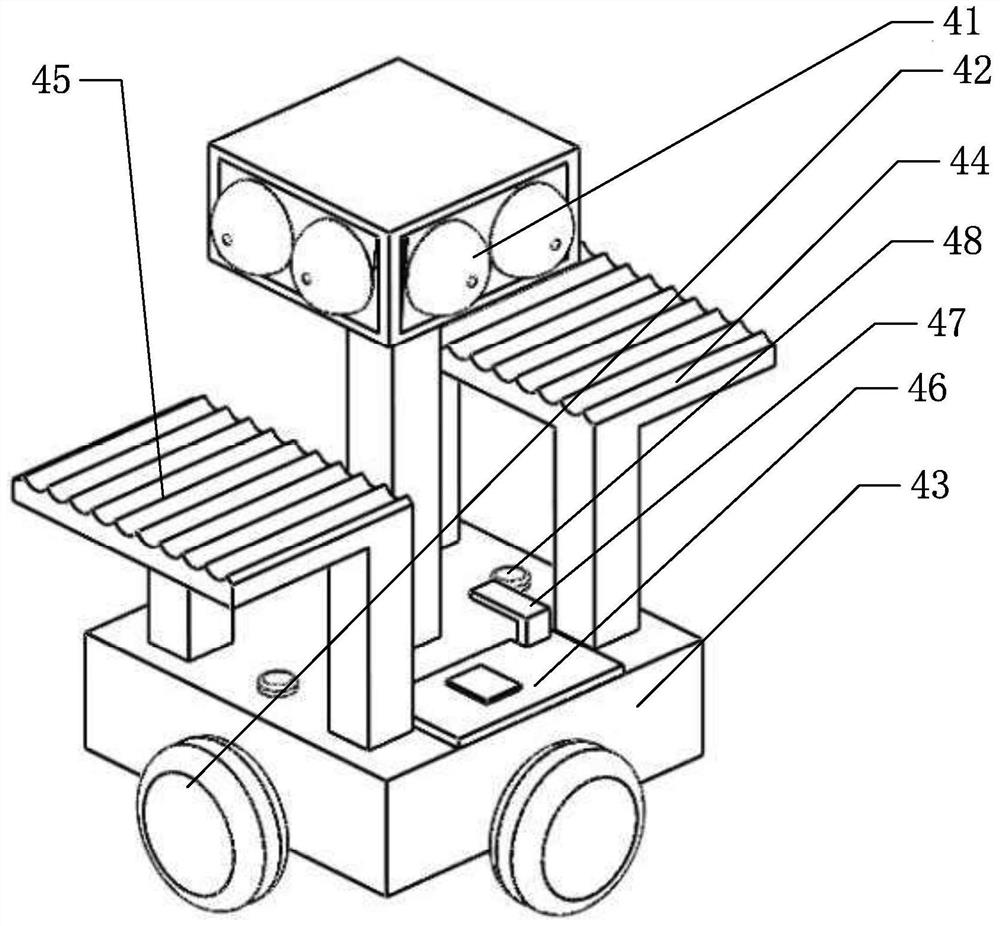
[0069] A number of sub-robots 4 used to carry goods 3 to be carried on the warehouse site 1;
[0070] A number of bluetooth base stations 2 for coordinating the positioning of the sub-robot 4;
[0071] A visual positioning system 5 located around the warehouse site 1 for locating the goods 3 to be transported; and
[0072] Cloud server (not shown), the sub-robot 4 communicates with the cloud server, and the cloud server controls the movement of the sub-robot 4; the Bluetooth base station 2 communicates with the cloud server, and the cloud server communicates with the cloud server through the Bluetooth base station. 2. Positioning the sub-robot 4; the visual positioning system 5 communicates with the cloud server, and the cloud server receives the position information of the goods to be transported...
Embodiment 2
[0086] like Figure 4 As shown, in one embodiment of the present invention, a robot logistics handling method based on Bluetooth base station positioning and scheduling, utilizing the robot logistics handling system based on Bluetooth base station positioning and scheduling described in Embodiment 1, includes the following steps:
[0087] Step 1: The visual positioning system 5 preliminarily predicts the position of the goods 3 to be transported, and transmits the position data of the goods 3 to be transported to the cloud server; specifically, a distribution map of the goods 3 to be transported can be formed on the display of the cloud server;
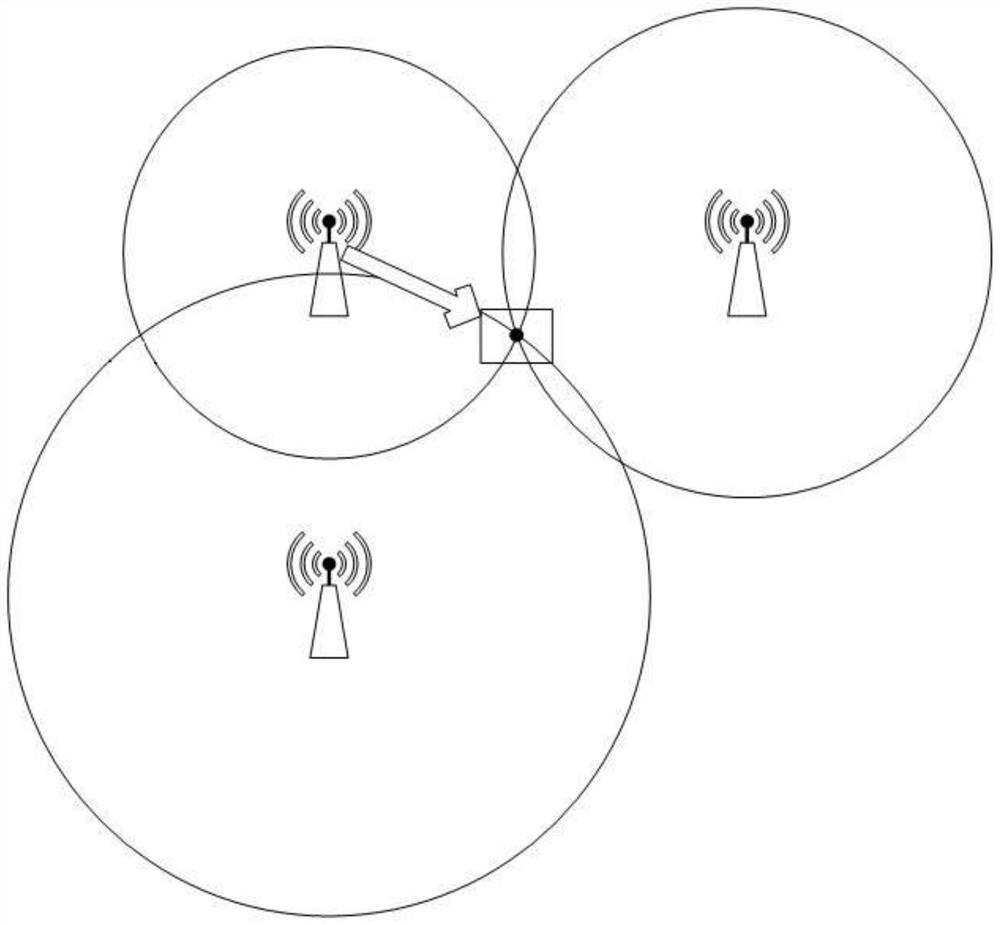
[0088] Step 2: The cloud server triangulates the coordinates of each sub-robot 4 through the Bluetooth base station 2, and forms a sub-robot 4 coordinate library in the cloud server; specifically, a distribution map of the sub-robot 4 can be formed on the display of the cloud server;
[0089] Specifically, such as image 3 As shown, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More