

Series-parallel hybrid robot leg configuration, walking robot and motion method thereof
A walking robot and hybrid mechanism technology, applied in the field of robotics, can solve the problems of small working space, large rotational inertia, easy interference, etc., and achieve the effects of increasing motion space and rotation angle, simple motion control, and increased stability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] In order to make the technical problems, technical solutions and advantages to be solved by the present invention clearer, the following will describe in detail with reference to the drawings and specific embodiments.
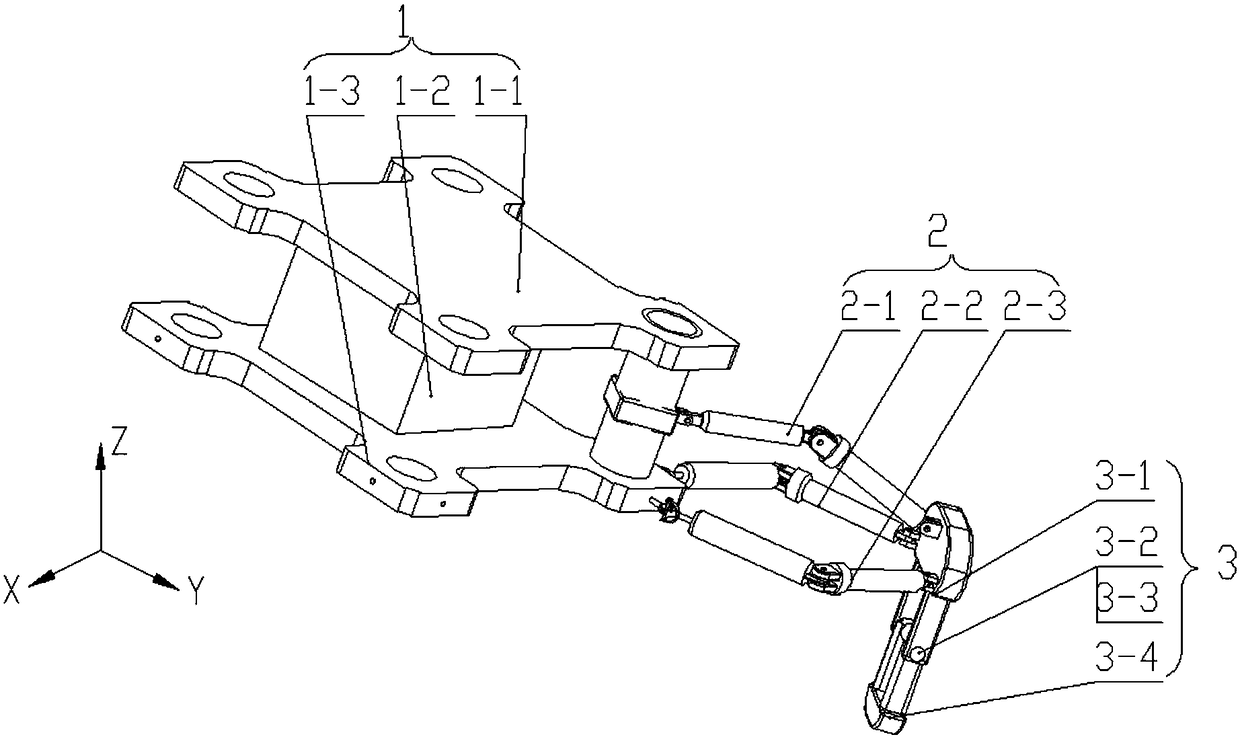
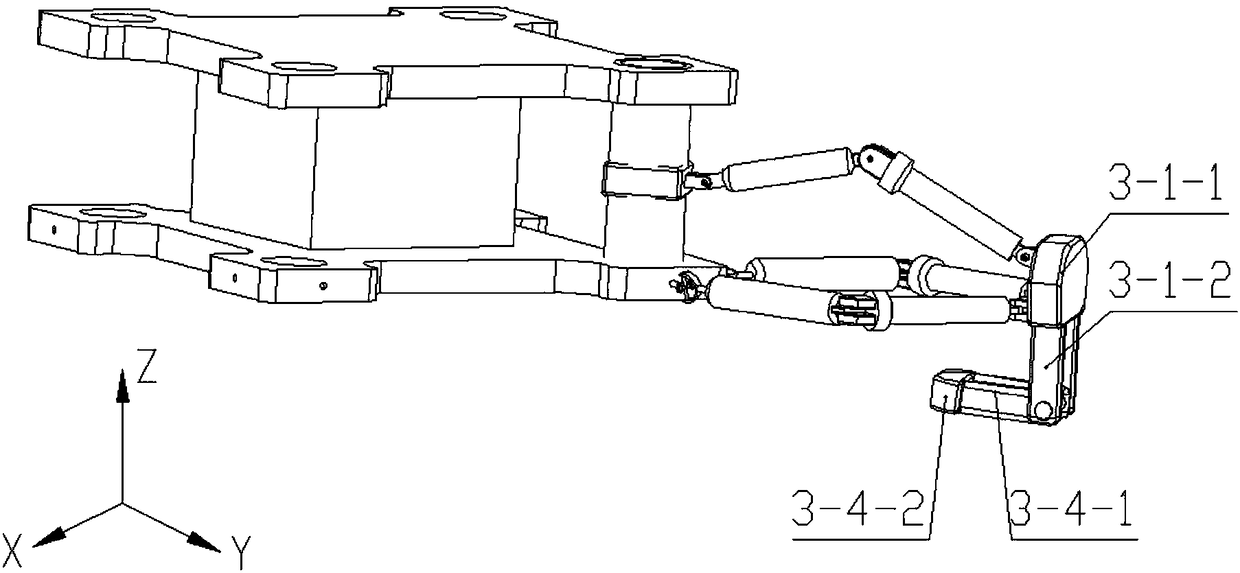
[0057] On the one hand, the present invention provides a leg configuration of a series-parallel hybrid robot, such as Figure 1-4 As shown, it includes a static platform 1, a dynamic platform 3 and a series-parallel hybrid mechanism 2 arranged between the static platform 1 and the dynamic platform 3, wherein:
[0058] The moving platform 3 includes a leg 3-1 and a foot 3-4, the leg 3-1 and the foot 3-4 are connected by a first rotating pair 3-2, and the first rotating pair 3-2 is provided with a second A rotary driver 3-3, the axis of the first rotating pair 3-2 is parallel to the plane where the static platform 1 is located;
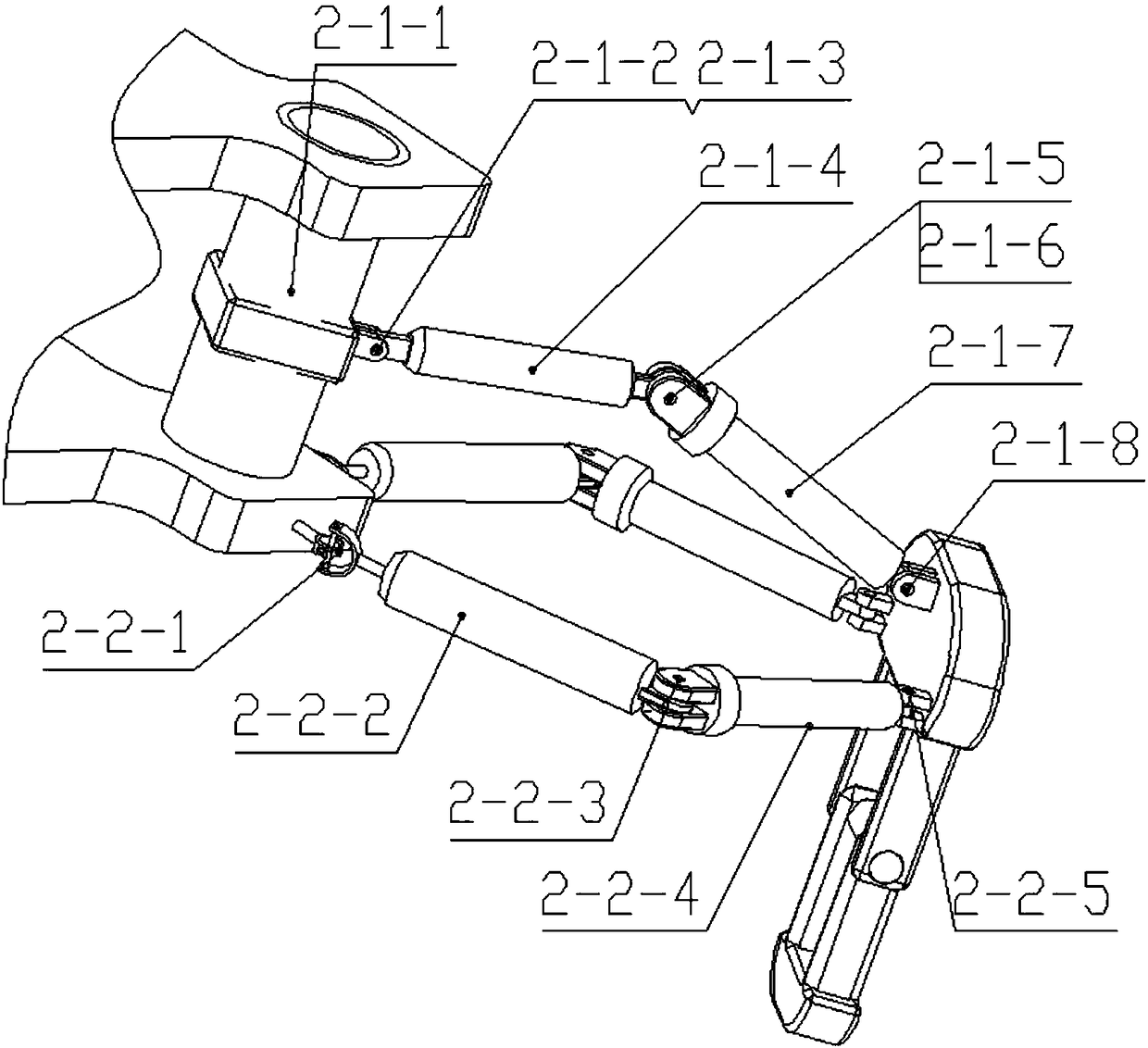
[0059] The series-parallel hybrid mechanism 2 includes an active drive branch chain 2-1 and two driven drive branch chains 2-2,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More