

Control method for controlling grabbing success rate of doll catcher
A control method and claw machine technology, applied in coin-operated equipment with instrument control, coin-free or similar appliances, coin-operated equipment that distributes discrete items, etc., can solve unfavorable game development, user loss of interest, Maintain user interest and other issues to achieve an effect suitable for large-scale promotion and use
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be further elaborated below in conjunction with the accompanying drawings and specific embodiments.
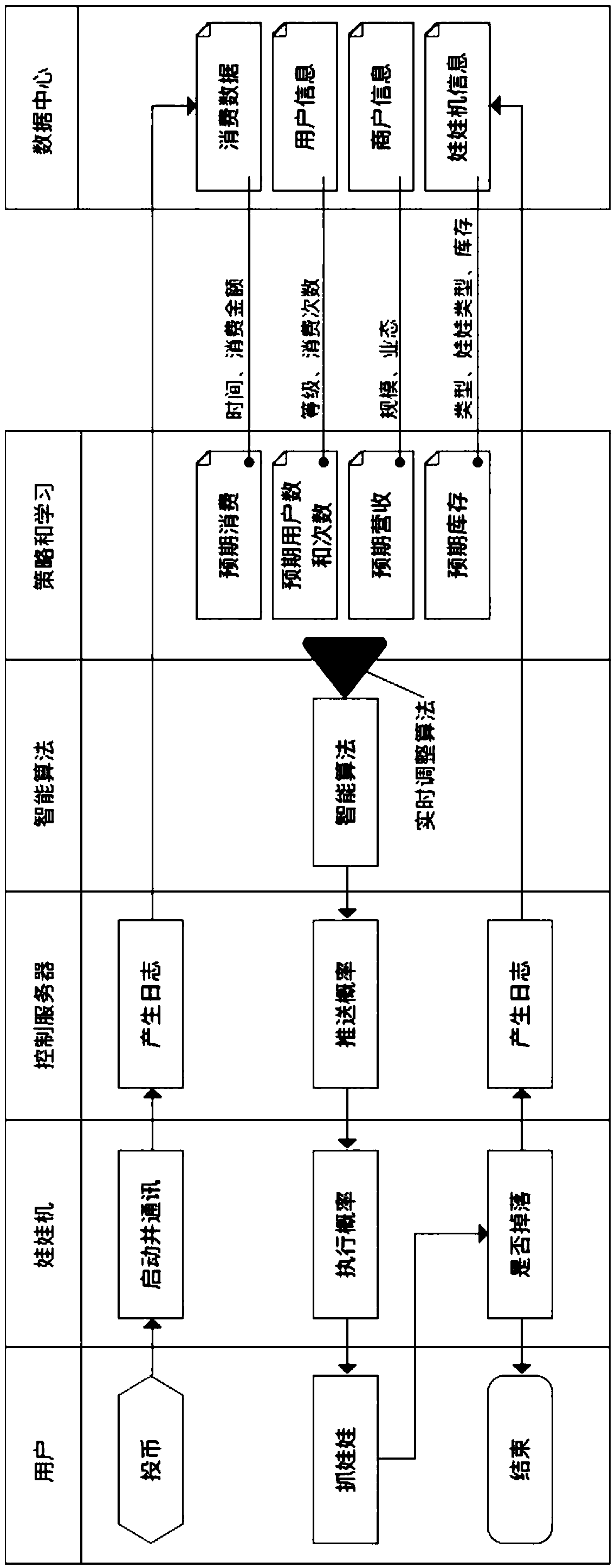
[0023] Such as figure 1 As shown, a control method for controlling the success rate of claw machine grabbing in this embodiment includes steps:
[0024] The first step, the user pays successfully, the claw machine communicates with the control server, and the control server generates logs and sends them to the data center.
[0025] In this step, the user can pay by coin or by scanning code.
[0026] The content of the log includes consumption data, which includes crawl time and consumption amount.
[0027] In the second step, the data center obtains logs, extracts consumption data, matches user information, merchant information, and claw machine information based on consumption data, builds a model and learns the model, and updates the probability in real time.
[0028] In this process, the data center obtains a log update probability accor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More