

A foot-type magnetic adsorption wall climbing robot
A wall-climbing robot and magnetic adsorption technology are applied in the field of wall-climbing robots, and can solve the problems of large steering resistance of crawler-type wall-climbing robots, unreliable adsorption of wheeled wall-climbing robots, and reducing the complexity of motion control, etc. The effect of strong load capacity and avoiding the fluctuation of the center of gravity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be further described below in conjunction with accompanying drawing and specific embodiment:
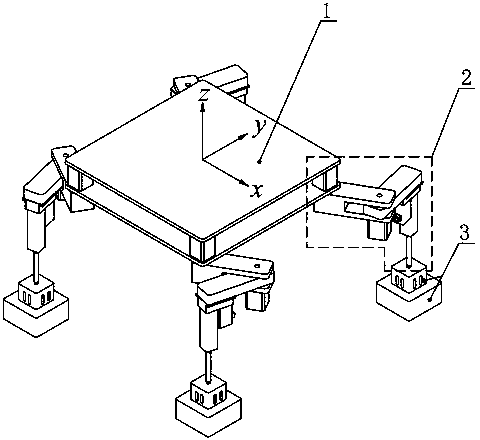
[0029] see figure 1 , 2 , a leg-type magnetic adsorption wall-climbing robot, including a carrying platform 1, walking legs 2 and adsorption feet 3; the carrying platform is connected to the walking legs 2 through the first rotating joint 5, and the walking legs 2 are connected to the adsorption feet through a ball hinge connection 11; the second A rotary joint 5, a second joint 7, and a rotational degree of freedom connected with a ball joint 11 form an RRR chain.
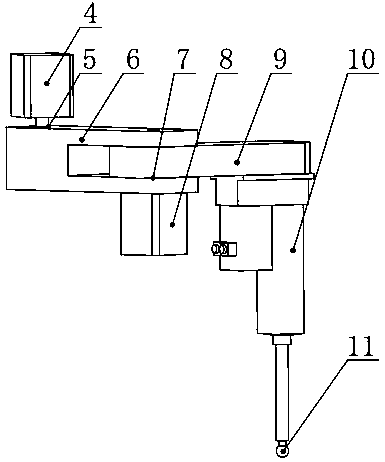
[0030] see figure 1 , 2 , the first servo motor 4 is installed on the carrying platform, drives the first rotary joint 5 to drive the first foot arm 6 to rotate; the second servo motor 8 is installed on the other end of the first foot arm 6 to drive the second active joint 7 to drive the second The active arm 9 rotates, and the other end of the second active arm 9 is fixedly connecte...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More