

Modeling method for soft climbing robot
A modeling method and robot technology, applied in the field of software climbing robot modeling, can solve the problems of immature software robot modeling technology, inability to obtain efficient software climbing robots, and restricting the development and application of software robots.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0068] Below in conjunction with accompanying drawing and specific embodiment, further illustrate the present invention, should be understood that these examples are only for illustrating the present invention and are not intended to limit the scope of the present invention, after having read the present invention, those skilled in the art will understand various aspects of the present invention All modifications of the valence form fall within the scope defined by the appended claims of the present application.
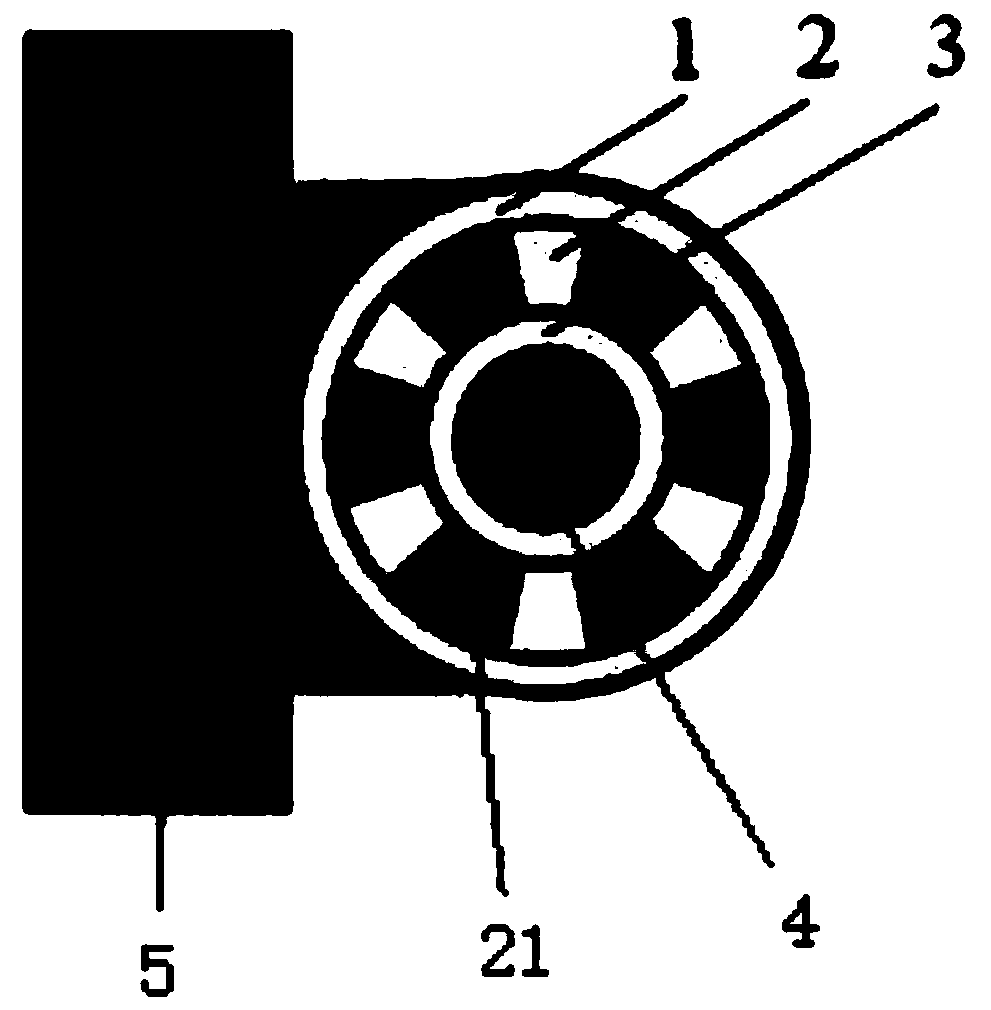
[0069] A modeling method for a soft climbing robot. The soft climbing robot includes a soft driver body, a clamping device providing clamping for the robot, and a pneumatic circuit control board providing gas drive. The software driver body includes a deformable layer 1, a supporting layer 2, a constraining layer 3, and a central housing cavity 4 arranged sequentially from the outside to the inside. The supporting layer 2 is provided with more than two airtight caviti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More