

Control method for yaw stability of electric vehicle driven by four-wheel hub motor
A stability control and electric vehicle technology, applied in the field of control, can solve problems such as tire lateral force constraints, energy consumption, and large additional torque of automobile motors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
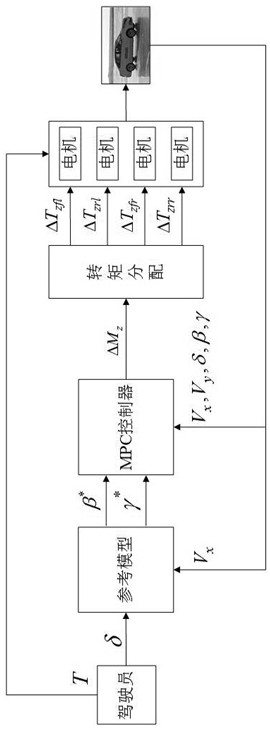
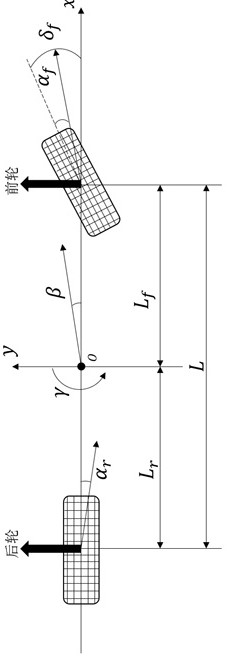
[0099] The invention mainly aims at the electric vehicle driven by four-wheel hub motors under extreme working conditions, and uses a model predictive control algorithm to realize the yaw stability control of the electric vehicle. by the desired center of mass sideslip angle β * and the desired yaw rate γ * Carry out tracking to make the car get better stability; at the same time, limit the tire lateral force, judge whether the tire lateral force is saturated at each sampling time in the prediction time domain, and use the obtained tire lateral force for Predict the future system state to make the prediction model more accurate; then constrain the additional yaw moment and optimize it in the objective function to obtain a smaller additional yaw moment and reduce energy loss; finally, solve The additional yaw moment is converted into additional torque and distributed to the four hub motors. The invention can well solve the above three problems, so that the automobile can obta...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More