

A wind turbine yaw control method
A control method and yaw control technology, applied in the control of wind turbines, engine control, engine control parameters, etc., can solve the problems of obvious hysteresis, poor accuracy, etc., to increase power generation, reduce extra load, and improve power capture Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
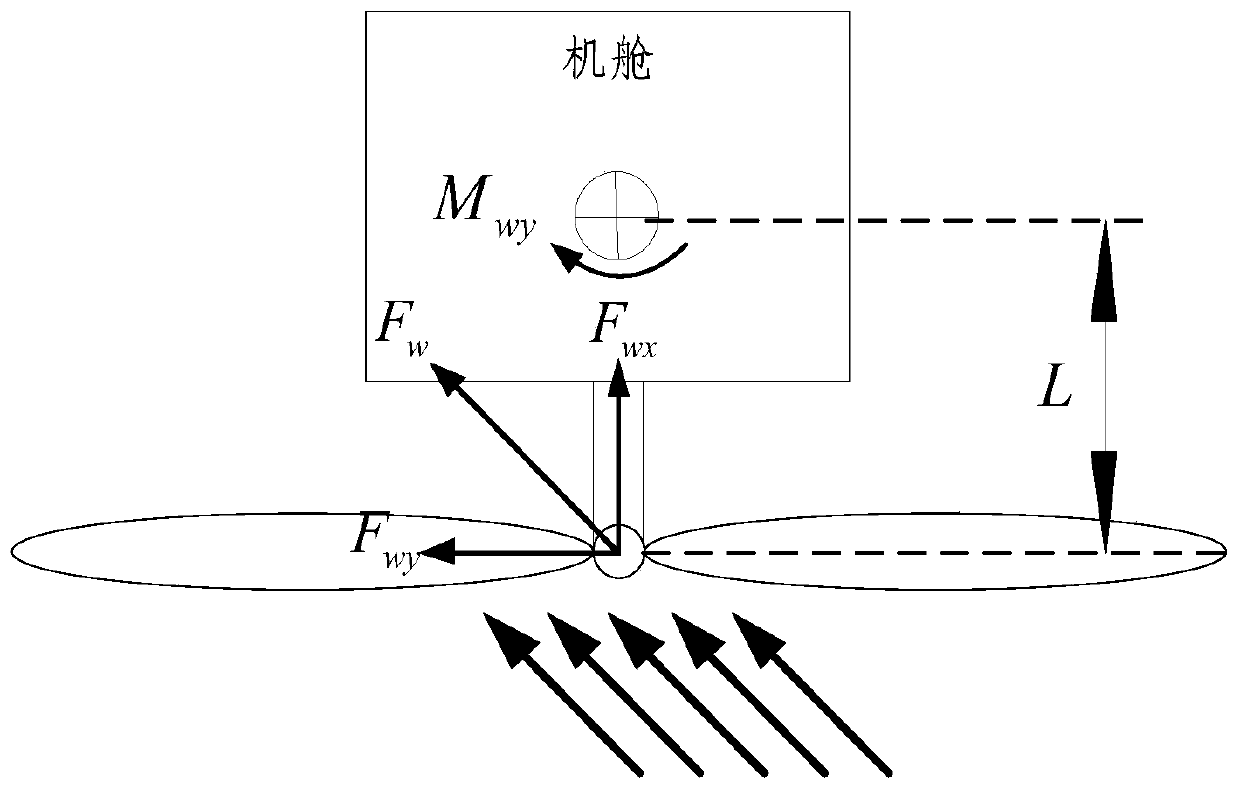
[0058] Such as image 3 As shown, the force of the horizontal axis wind turbine when the wind direction is not aligned with the impeller, then
[0059] f wy =F w sinθ ε =pAcosθ ε sinθ ε
[0060] m wy =F wy ·L
[0061] The torque of the wind direction to the wind rotor can be calculated as
[0062]
[0063] In the formula, θ ε Indicates the angle between the wind direction and the normal direction of the wind rotor, F w Indicates the force of the wind on the impeller, F wx Indicates the component of the wind force on the x-axis, F wy Indicates the component of the wind force on the y-axis, and L indicates the distance between the center of the tower and the impeller in the x-axis direction.
[0064] It can be seen that the torque caused by the wind direction depends on v and θ ε , when the wind speed reaches or exceeds the rated wind speed and the angle between the wind direction and the normal direction of the wind rotor reaches 45°, M wy Reaches the maximum ...
Embodiment 2
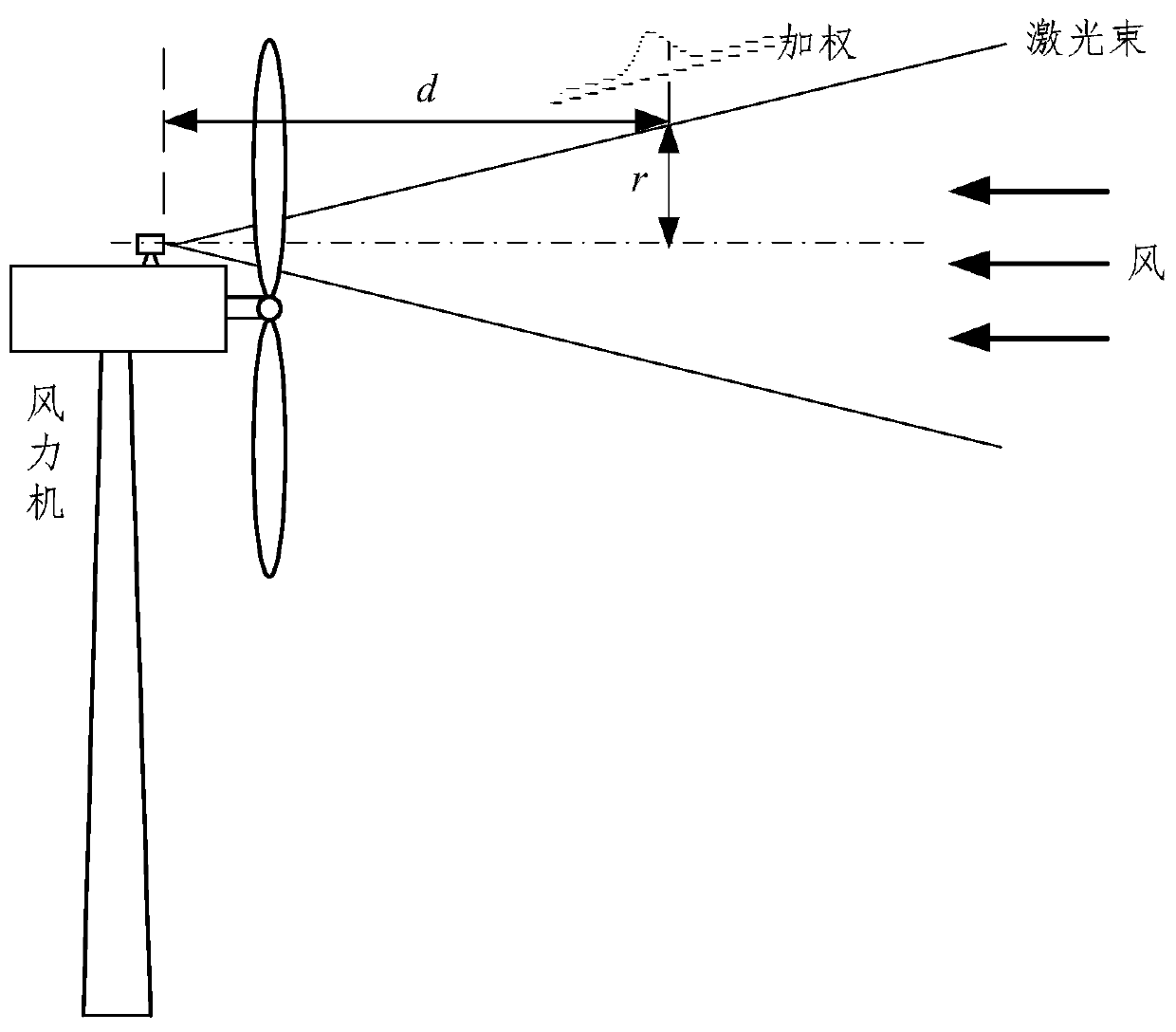
[0071] Such as figure 2 As shown, the scanning method of wind lidar is mostly in the form of conical scanning, d is the measurement distance, and r is the scanning radius. In order to reduce the error in the processing of Doppler frequency shift in single-point measurement, the wind speed results are generally The multiple wind speeds are spatially averaged, and the weight is configured according to the distance of the reflected photon from the focal point, and then the wind speed in the direction of a light is obtained. The distance weighted by the radar measurement is as follows: figure 2 shown in the middle curve.
Embodiment 3
[0073] In step S2 described in Embodiment 1, the specific method for calculating the inversion wind speed and inversion wind direction is:
[0074] First calculate the wind speed and wind direction on the upper beam plane as:
[0075]
[0076] UD=arctan2(v y ,v x )
[0077] In the formula, UWS: upper beam plane wind speed; UD: upper beam plane wind direction.
[0078] in addition,
[0079]
[0080] In the formula, RWS 1 : line-of-sight wind speed measured at line-of-sight 1 on the upper plane; RWS 2 : line-of-sight wind speed measured at line-of-sight 2 on the upper plane; θ t : half of the angle between the left and right beam planes; θ s : half of the angle between the upper and lower beam planes.
[0081] The vertical wind shear is:
[0082]
[0083] The rate of change of vertical wind direction is:
[0084] VD=(UD-DD) / (2X t tanθ s )
[0085] In the formula, DWS: down beam plane wind speed; DD: wind direction; H lidar : Radar installation height; H...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More