

Five-order active disturbance rejection control method for continuous rotary motor electro-hydraulic servo system
An electro-hydraulic servo system, active disturbance rejection control technology, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve the problem of high-order active disturbance rejection control without obvious improvement of control accuracy and frequency response There are too many parameters to be tuned, and the performance of the motor cannot be satisfied, so as to improve tracking accuracy and response frequency, save computing time, and achieve good control performance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] In conjunction with the accompanying drawings, the control method of the present invention is described in detail:
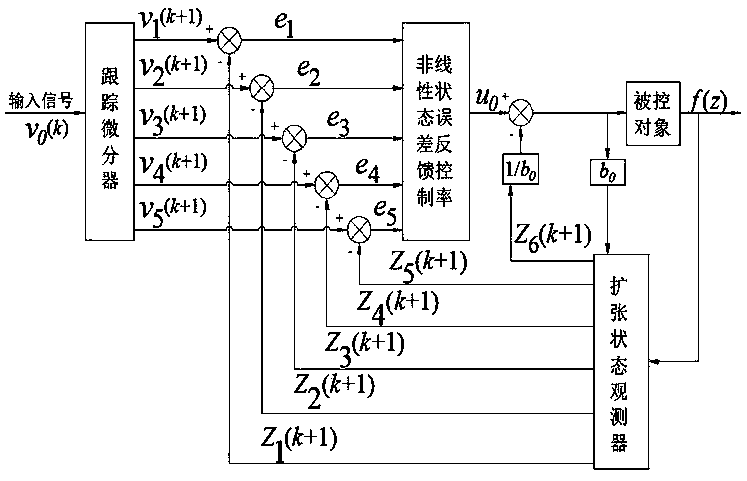
[0024] Such as figure 1 As shown, a structure diagram of a fifth-order active disturbance rejection control method for the electro-hydraulic servo system of a continuous rotary motor; the specific control process is: given the input signal v at time k 0 (k) Obtain v at time k+1 by tracking the differentiator 1 (k+1), v 2 (k+1), v 3 (k+1), v 4 (k+1), v 5(k+1), through the k+1 time z of the extended state observer 1 (k+1), z 2 (k+1), z 3 (k+1), z 4 (k+1), z 5 (k+1) as a difference, get the error e 1 , e 2 , e 3 , e 4 , e 5 , as the input of the nonlinear error feedback control law, the output u 0 , by combining with z 6 The operation of (k+1) acts on the controlled object as a dynamic compensation to obtain f(z).
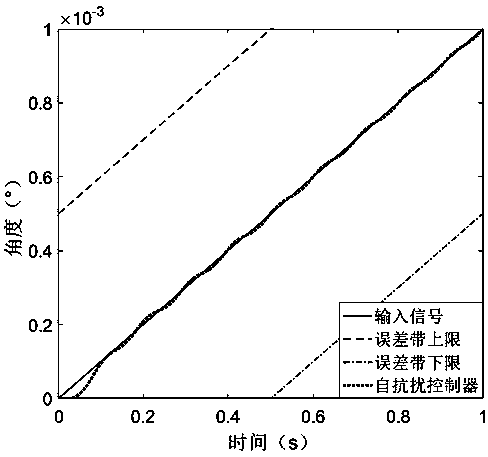
[0025] Such as figure 2 As shown, the thin solid line is the slope input signal with a slope of 0.001° / s, and the dotted line...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More