An autonomous mobile robot and its path navigation and path planning method and system
A path navigation and path planning technology, applied in navigation calculation tools, control/regulation systems, instruments, etc., can solve problems such as large time overhead and lack of completeness, avoid jitter, meet vehicle dynamics constraints, and satisfy curvature Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be described in detail below with reference to the accompanying drawings.
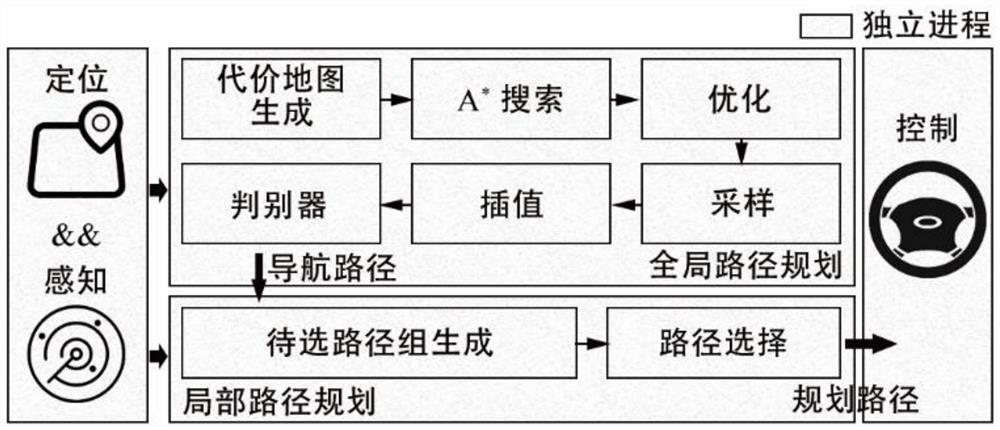
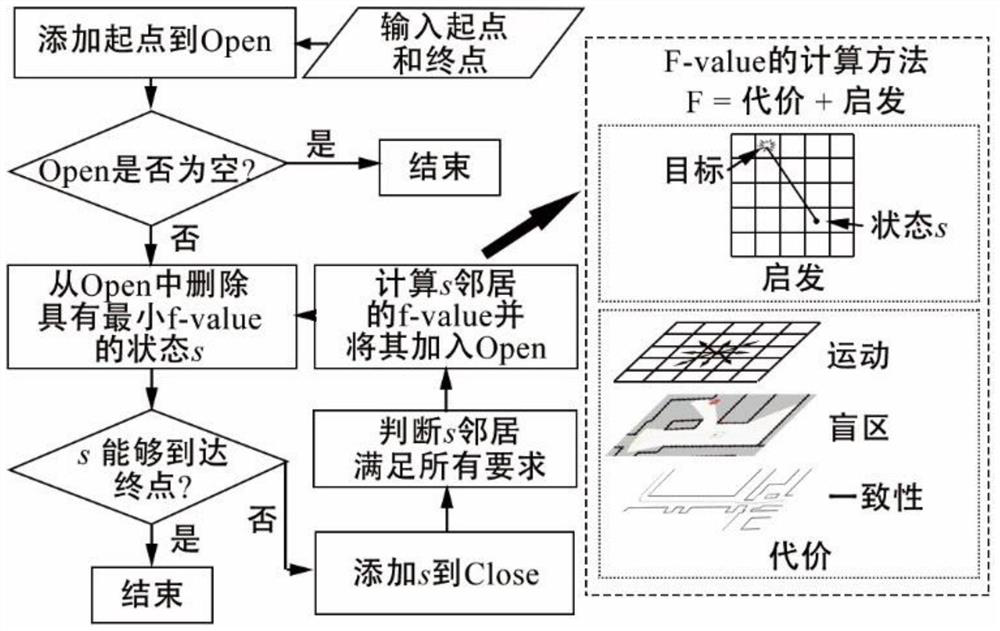
[0040] The framework of the path planning method proposed by the present invention is as follows: figure 1As shown, the global planning and the local planning include two independent processes; the paths are updated in different cycles; among them, the global planning generates the cost map after obtaining the positioning and perception information, and the generated cost map is used for the A star The path is searched to obtain the initial navigation path, and then the path is optimized, and after the optimization is completed, the key points in it are sampled for interpolation; at this point, the global navigation path is generated.
[0041] However, there is no guarantee that the global path generated at this time is valid. Therefore, a discriminator is introduced to judge whether the generated global path is valid, and if it is invalid, it will be discarded. Anoth...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More