

Cross-terminal picture transmission method and system
A picture transmission and cross-terminal technology, applied in the field of data transmission, can solve problems such as inoperability, poor compatibility, and real-time picture acquisition, and achieve low-latency transmission, high versatility, and easy deployment.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
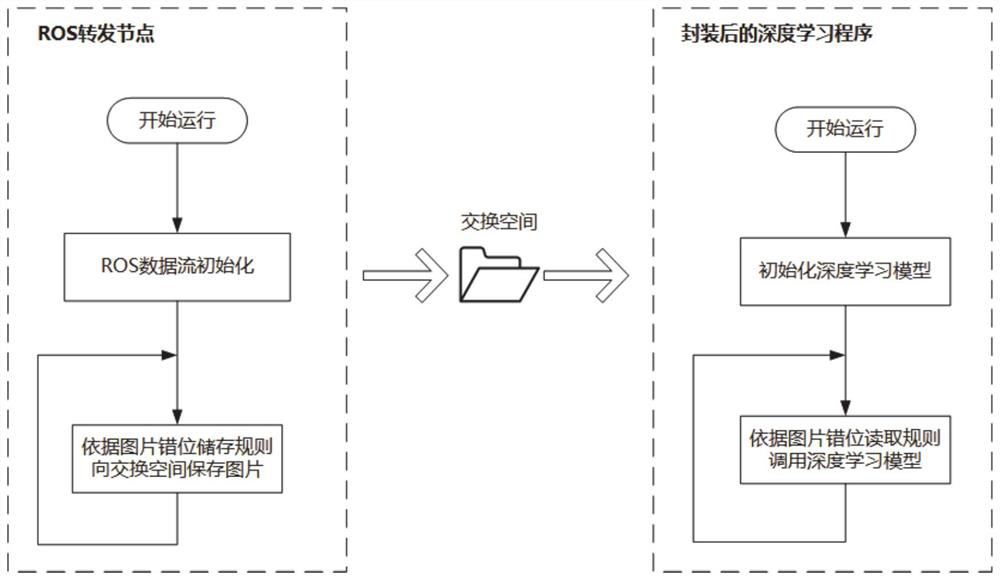
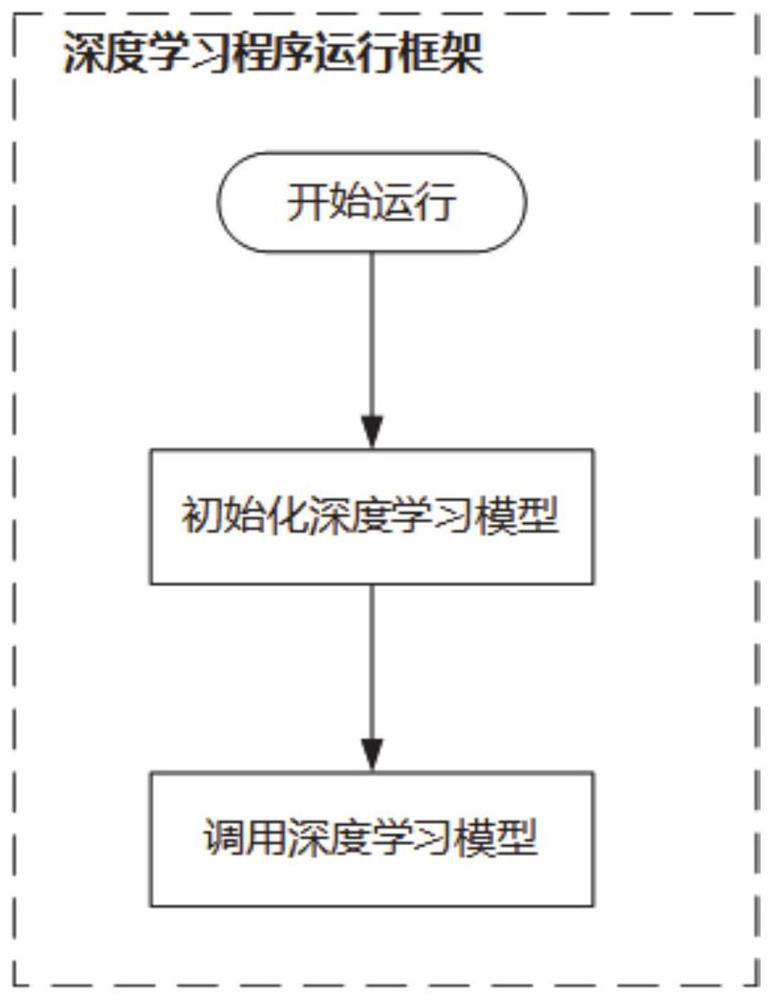
[0051] Such as Figure 1-Figure 5 As shown, Embodiment 1 of the present disclosure provides a method for high-speed cross-terminal image transmission from ROS data flow to a Python3-based deep learning program. This method can realize the low-latency cross-terminal transmission of the ROS image data stream on the robot computer and the deep learning program on the server; it can protect the Python3 environment of deep learning from any conflict with the public Python2 environment of ROS, and can be applied to Various deep learning programs with different operating environments have high versatility; the deployment of this method can be completed with minor changes to the deep learning program, no code refactoring, no need to care about the startup sequence, easy to deploy and use .
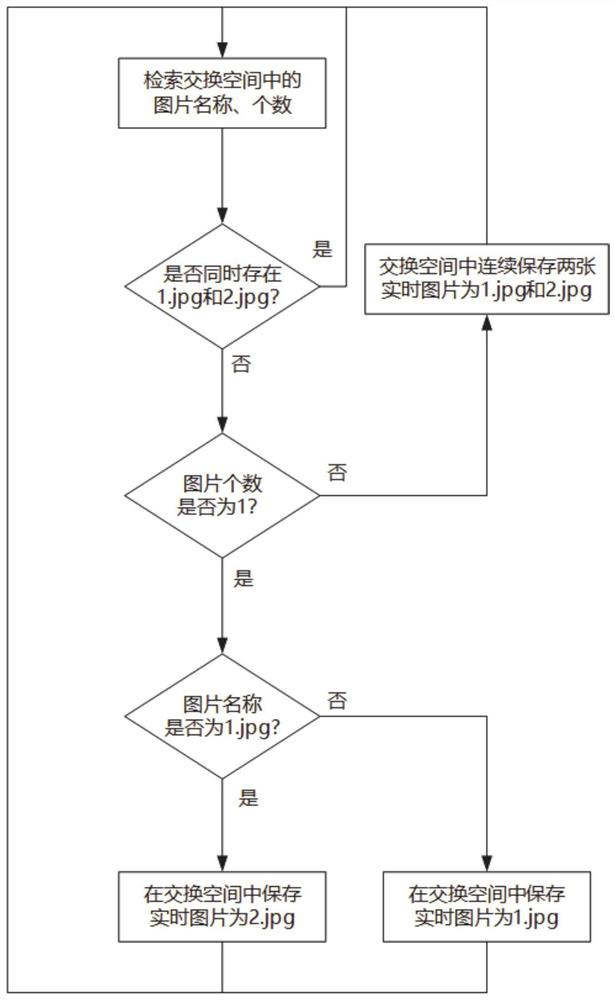
[0052] The method of this embodiment adopts the mode of image storage and reading based on the hard disk to solve the data flow in ROS and the image transmission problem of the deep learning prog...
Embodiment 2
[0113]Embodiment 2 of the present disclosure provides a cross-terminal picture transmission system, including: a first terminal and a second terminal, the first terminal is equipped with a robot operating system, and the second terminal is equipped with a preset deep learning network model;
[0114] The data forwarding node on the second terminal stores pictures from the data flow of the robot operating system to the exchange space in real time according to the image dislocation storage method, and the deep learning program of the preset deep learning network model reads from the exchange space according to the image dislocation reading method picture and process it.
[0115] The working method of the system is the same as the method provided in Embodiment 1, and will not be repeated here.
[0116] Those skilled in the art should understand that the embodiments of the present disclosure may be provided as methods, systems, or computer program products. Accordingly, the presen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More