

Unmanned ship bridge crossing control method and device, electronic equipment and storage medium
A control method and technology for unmanned ships, which are applied in non-electric variable control, control/regulation systems, two-dimensional position/channel control, etc., and can solve the problems of weak positioning signals and difficult control of unmanned ships.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] In order to make those skilled in the art more clearly understand the purpose, technical solutions and advantages of the present invention, the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
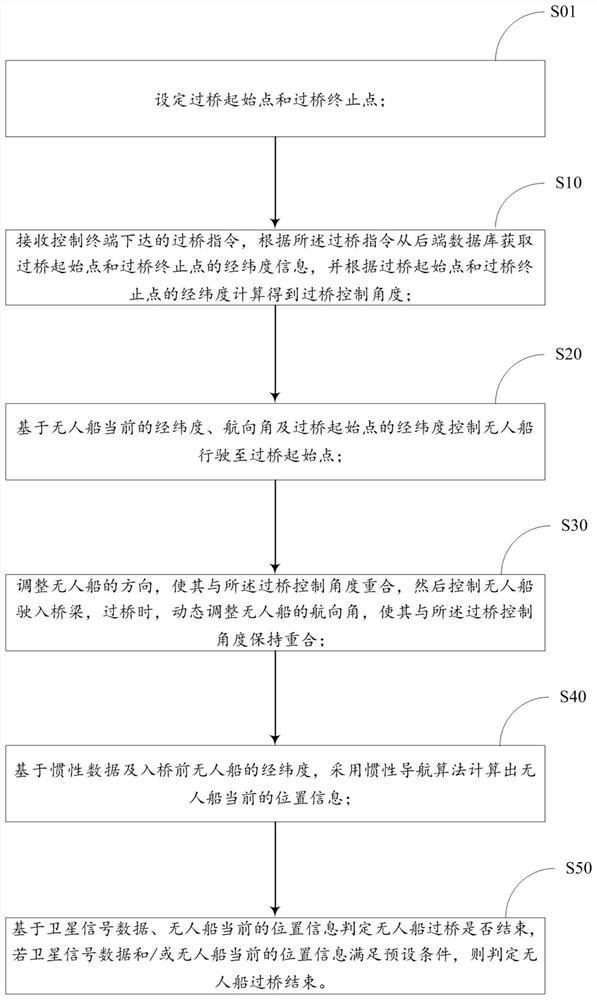
[0018] figure 1 Shows a work flow diagram of a control method for unmanned ship bridge crossing of the present invention, as figure 1 As shown, in one embodiment of the present invention, the unmanned ship bridge control method includes the following steps:
[0019] S10. Receive the bridge crossing instruction issued by the control terminal, obtain the longitude and latitude of the bridge crossing starting point and the bridge crossing termination point from the back-end database according to the bridge crossing instruction, and calculate the crossing according to the longitude and latitude of the bridge crossing starting point and the bridge crossing termination point. bridge control angle;
[0020] The executive...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More