

Path planning method and device, storage medium and electronic equipment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
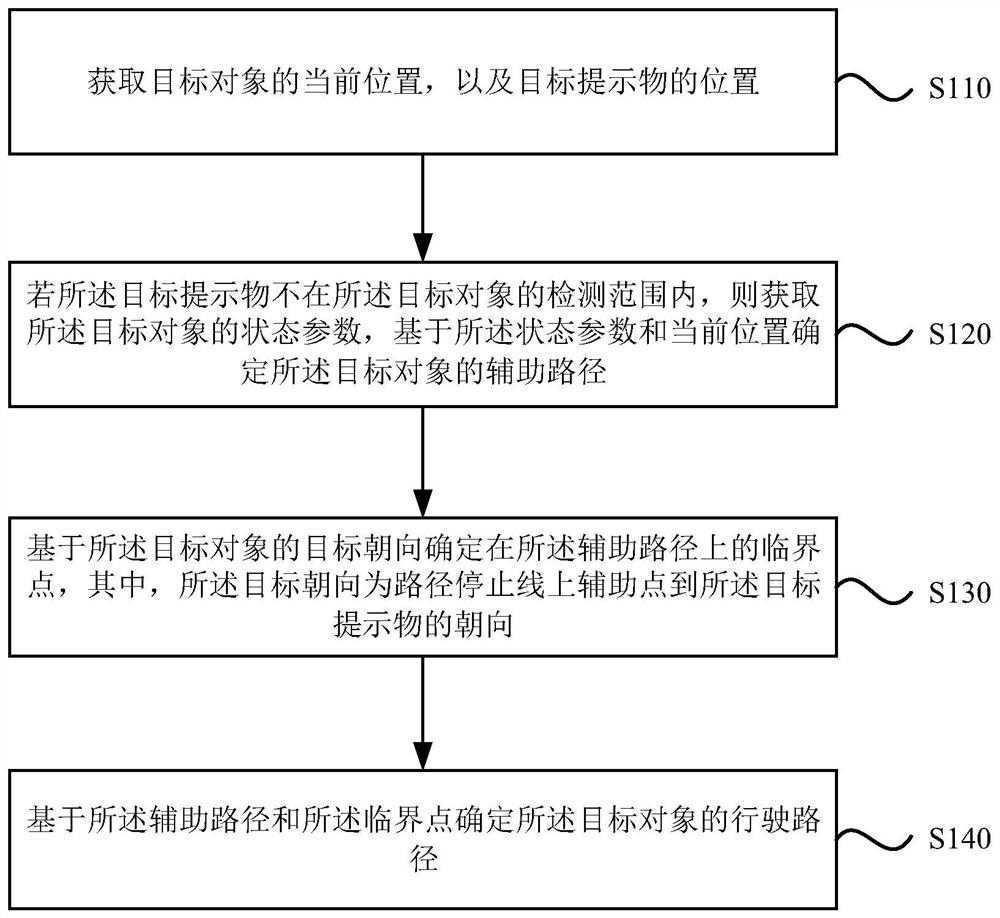
[0041] figure 1 It is a schematic flow chart of a path planning method provided by Embodiment 1 of the present invention. This embodiment is applicable to the situation where a low-speed vehicle performs path planning when turning in an automatic driving scenario. The path planning device can be implemented by a path planning device, which can be implemented by software and / or hardware, and the path planning device can be configured on electronic computing devices such as vehicle controllers, mobile phones, and tablet computers.
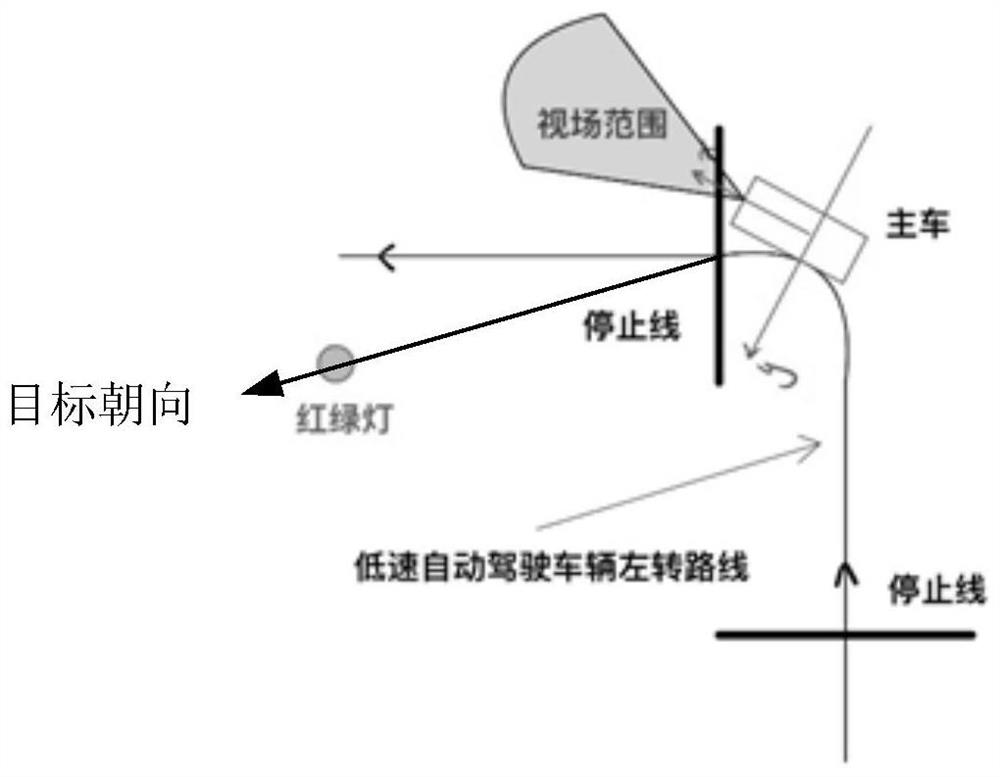
[0042] see figure 2 , figure 2 It is a schematic diagram of an automatic driving scene provided by an embodiment of the present invention. It should be noted that, in this embodiment, the self-driving vehicle (i.e., the target object) is a low-speed vehicle. During the automatic driving process, in the case of a turning (especially a left turn) scene, its driving path is to go straight to the opposite side of the road, and After making a 90-degr...
Embodiment 2
[0072] Figure 4 It is a schematic structural diagram of a path planning device provided in Embodiment 2 of the present invention, and the device includes:
[0073] A position acquiring module 210, configured to acquire the current position of the target object and the position of the target reminder;
[0074] An auxiliary path determination module 220, configured to acquire state parameters of the target object if the target prompt is not within the detection range of the target object, and determine an auxiliary path of the target object based on the state parameters and the current position , wherein the target object is on the auxiliary path;
[0075] A critical point determination module 230, configured to determine a critical point on the auxiliary route based on the target orientation of the target object, wherein the target orientation is the orientation from the auxiliary point on the path stop line to the target reminder;
[0076] The first driving route determinat...
Embodiment 3
[0094] Figure 5 It is a schematic structural diagram of an electronic device provided by Embodiment 3 of the present invention. Figure 5 A block diagram of an electronic device 12 suitable for implementing embodiments of the invention is shown. Figure 5 The electronic device 12 shown is only an example, and should not limit the functions and scope of use of the embodiments of the present invention. Device 12 is typically an electronic device undertaking image classification functions.
[0095] Such as Figure 5 As shown, electronic device 12 takes the form of a general-purpose computing device. Components of the electronic device 12 may include, but are not limited to, one or more processors 16, a storage device 28, and a bus 18 connecting various system components (including the storage device 28 and the processor 16).
[0096] Bus 18 represents one or more of several types of bus structures, including a memory bus or memory controller, a peripheral bus, an accelerated...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More