

Substation scene mapping and positioning optimization method based on laser and vision fusion
A positioning optimization, substation technology, applied in image analysis, 3D modeling, surveying and navigation, etc., can solve the problem of single-line lidar being unable to perceive three-dimensional obstacles and laser penetration, and achieve the goal of improving stability and speeding up matching speed. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be described in detail below with reference to the accompanying drawings, and the objects and effects of the present invention will become more apparent.
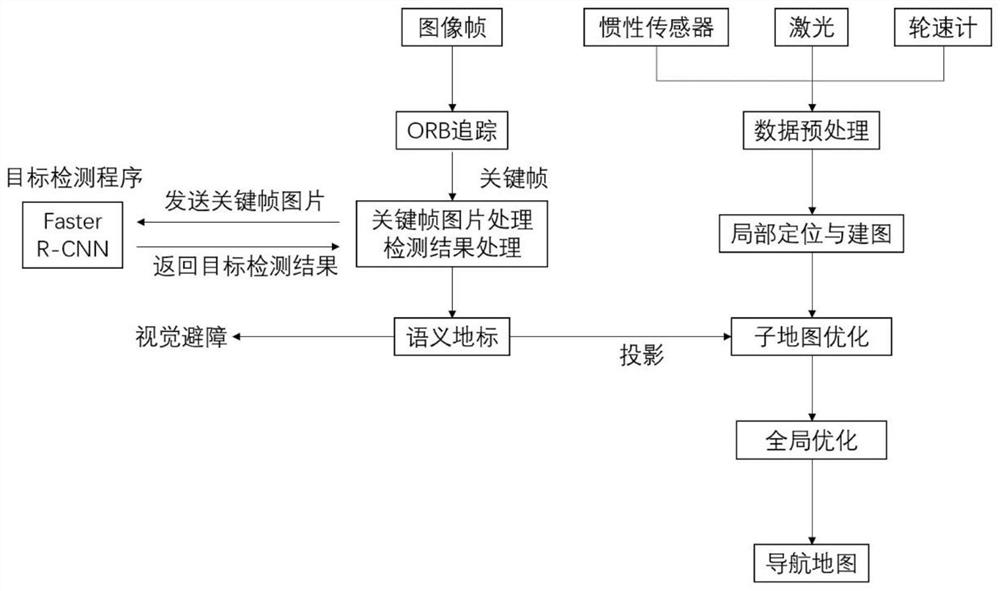
[0037] In order to realize the purpose of inspection robots replacing manual inspections in the complex operation and maintenance environment of substations, to ensure the normal operation of substations, and to provide better readability of the navigation map for subsequent manual navigation of robots. The invention solves the problems of poor human readability, long positioning time and easy loss of maps constructed in complex environments, and provides a method for realizing stable positioning in a substation and building a navigation map with strong human readability. The implementation flow chart is as figure 1 shown. The specific implementation steps are as follows:
[0038] Step 1: The substation inspection robot scans the environment of the entire substation through the mounted si...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More