Two degree-of-freedom parallel manipulator
A degree of freedom and manipulator technology, applied in the direction of program control manipulators, joints, manipulators, etc., can solve the problems of unfavorable robot dynamics, cumbersome parts, lack of accuracy, and high realization.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] With the figures in question, one possible embodiment of a two-degree-of-freedom parallel manipulator according to the invention is disclosed.
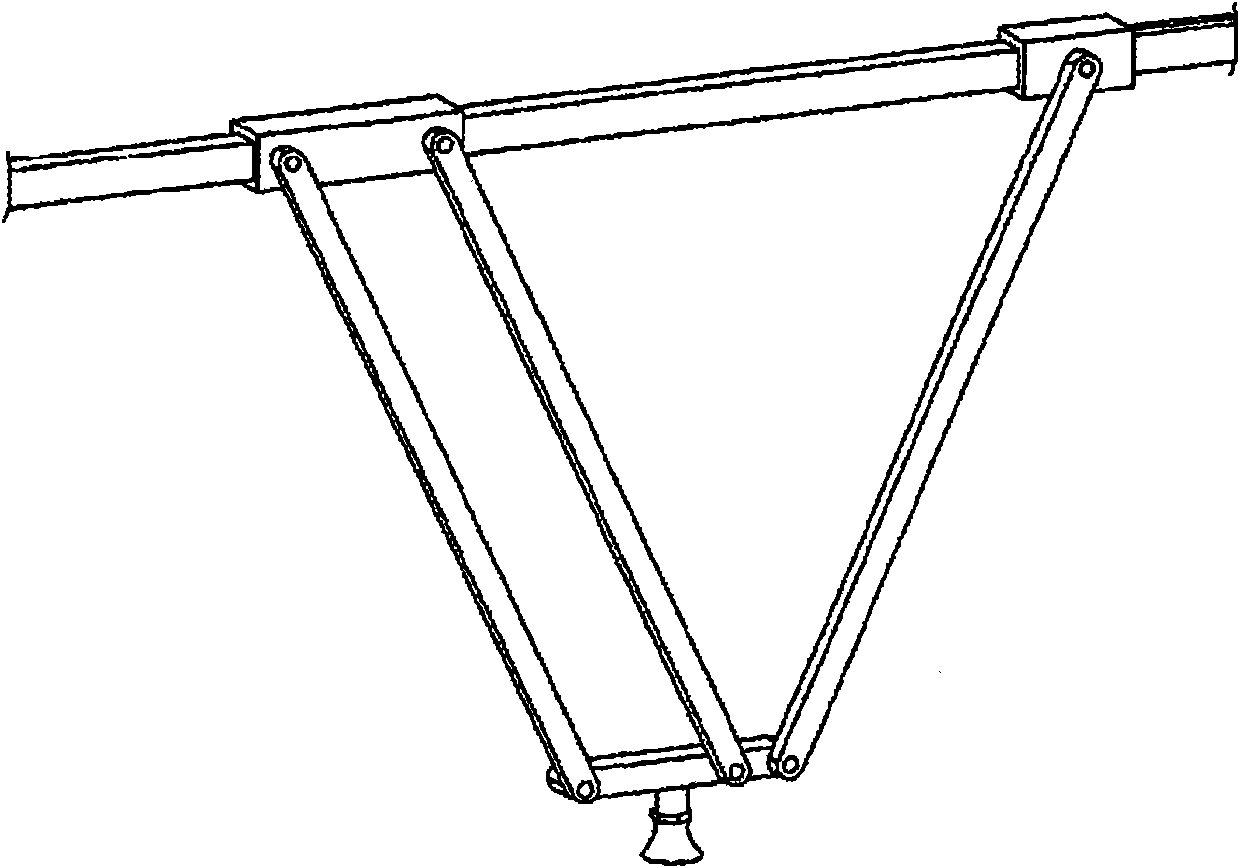
[0037] Figure 5 A general view of the manipulator according to the invention is shown. The manipulator comprises a frame 1, four frame arms 3, 3', 4, 4', four platform arms 5, 5', 5", 5"', a rigid platform 6 and an end effector. The end effector holds the object, while the manipulator does the "pick and place" work.
[0038] Both the frame arm and the platform arm have a first end and a second end. The four frame arms 3, 3', 4, 4' are coupled to the rigid frame by their first ends. Each frame arm is coupled to the first end of the platform arm by its second end having a ball joint 7, that is to say, the ball joint 7 links the first frame arm 3 and the first platform arm 5, similarly the ball joint 7 links the first The second frame arm 3' and the second platform arm 5', the third frame arm 4 and the third platform arm 5", ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More