

A device and design method for preventing accidental collision of robots
A technology of robots and robot bodies, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems that cannot solve the safety problems of industrial robots, and achieve the effect of protecting the objects being hit, preventing the development of collisions, and simple implementation methods
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
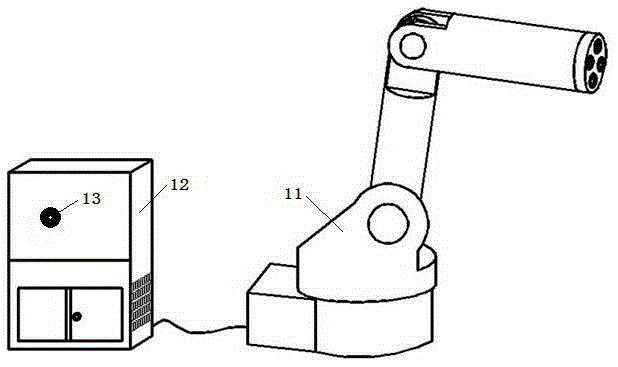
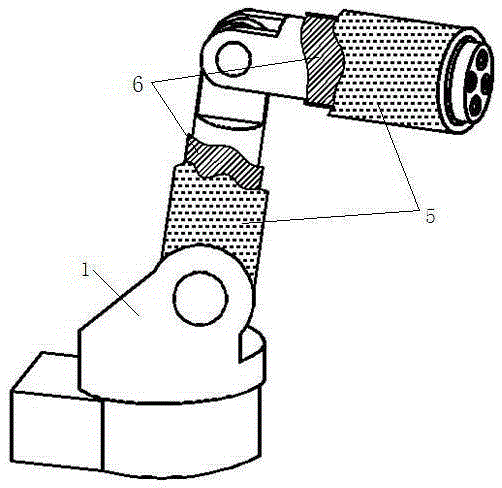
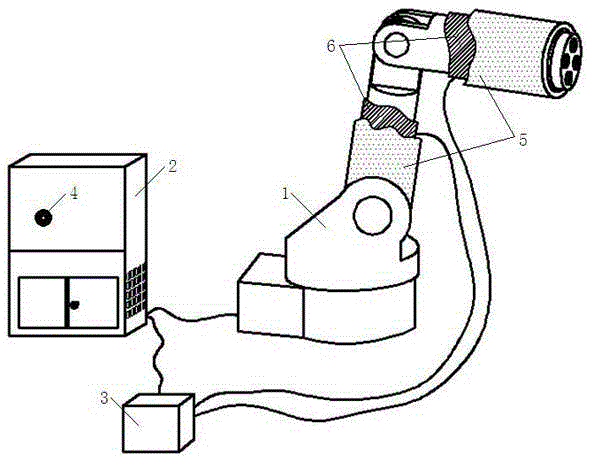
[0024] Such as figure 1 Shown is a common industrial robot system, which is composed of a robot body 11 and a controller 12, and an emergency stop button 13 is provided on the controller. exist figure 1 On the basis of the general robot system, the present invention provides a device for preventing accidental collisions of robots, such as figure 2 and image 3 As shown, it includes a robot body 1, a controller 2 and a safety protector 3, the controller 2 is connected to the robot body 1, and the controller 2 is provided with an emergency stop button 4, and the robot body 1 A viscoelastic buffer layer 5 is attached on the top, and one or more tactile sensors 6 are attached on the viscoelastic buffer layer 5, and the tactile sensor 6 is connected to the input interface of the safety protector 3, and the emergency stop button 4. Connect the output interface of the safety protector 3. The main function of the viscoelastic buffer layer 5 is to reduce the impact force of the co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More