

Device and method for controlling single-bus modular digital actuator of robot
A robot single and modular technology, applied in the direction of program-controlled manipulators, manipulators, manufacturing tools, etc., can solve the problems of multiple main control module interfaces, limit system miniaturization, and cumbersome system wiring, and achieve optimal performance, acceleration and deceleration Fast, high-precision results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0038] First introduce the hardware structure of the present invention:
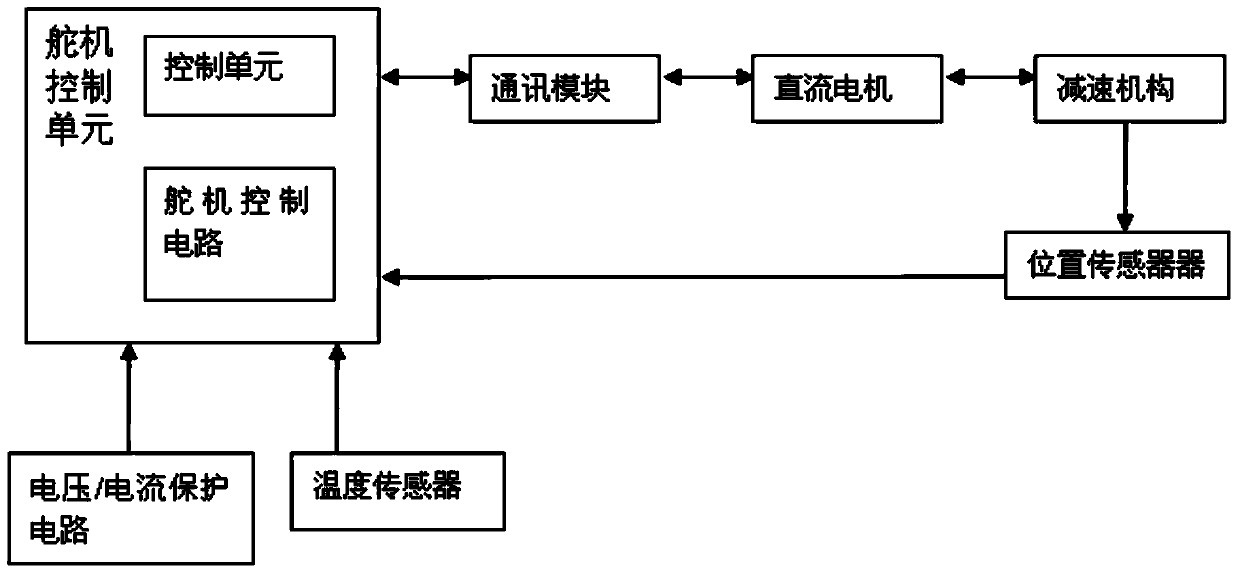
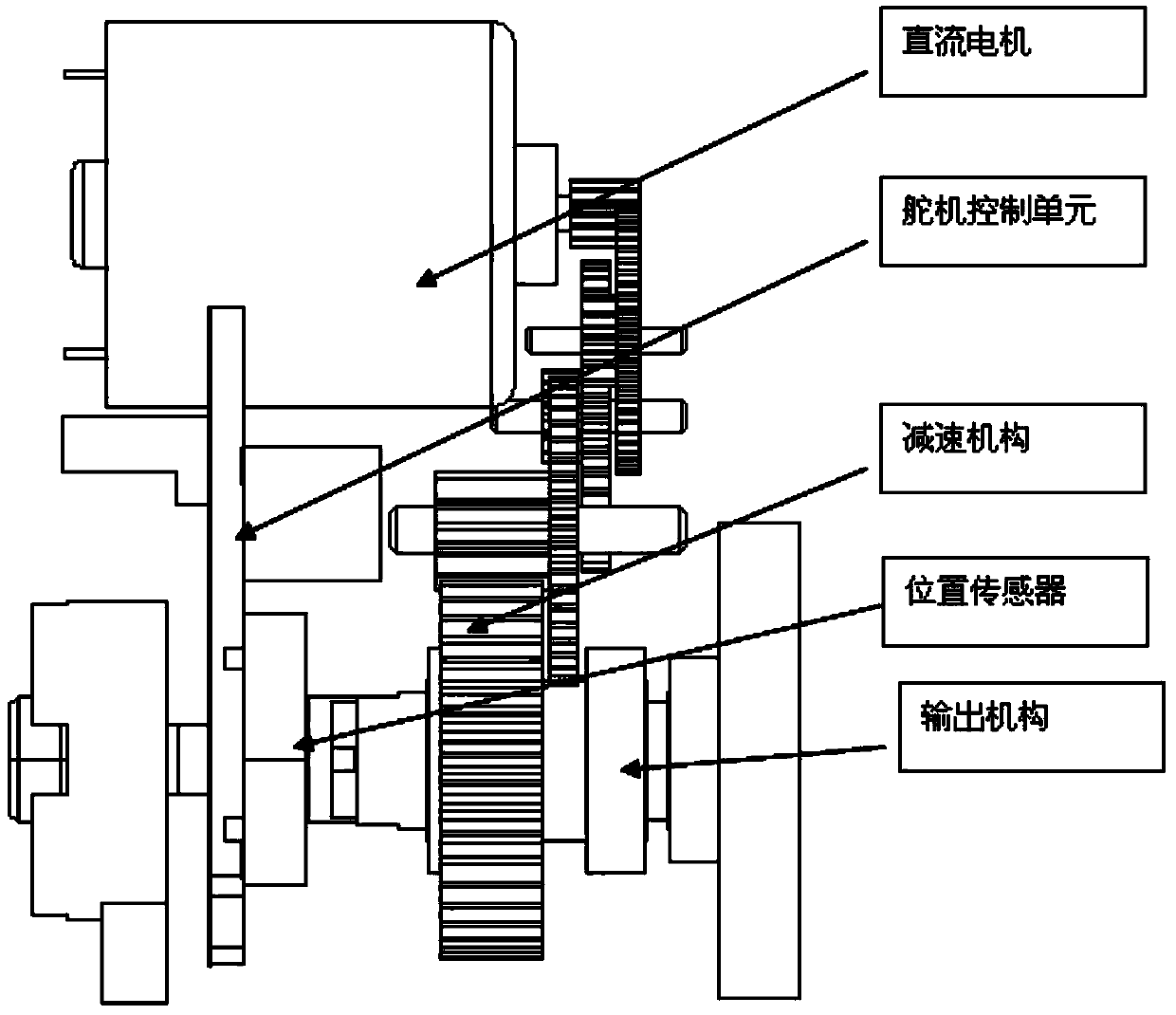
[0039] 1. This steering gear is composed of steering gear control unit, DC motor, communication module, deceleration mechanism, output mechanism, position sensor, temperature sensor and current protection circuit. The structure control principle diagram is as figure 1 Shown.
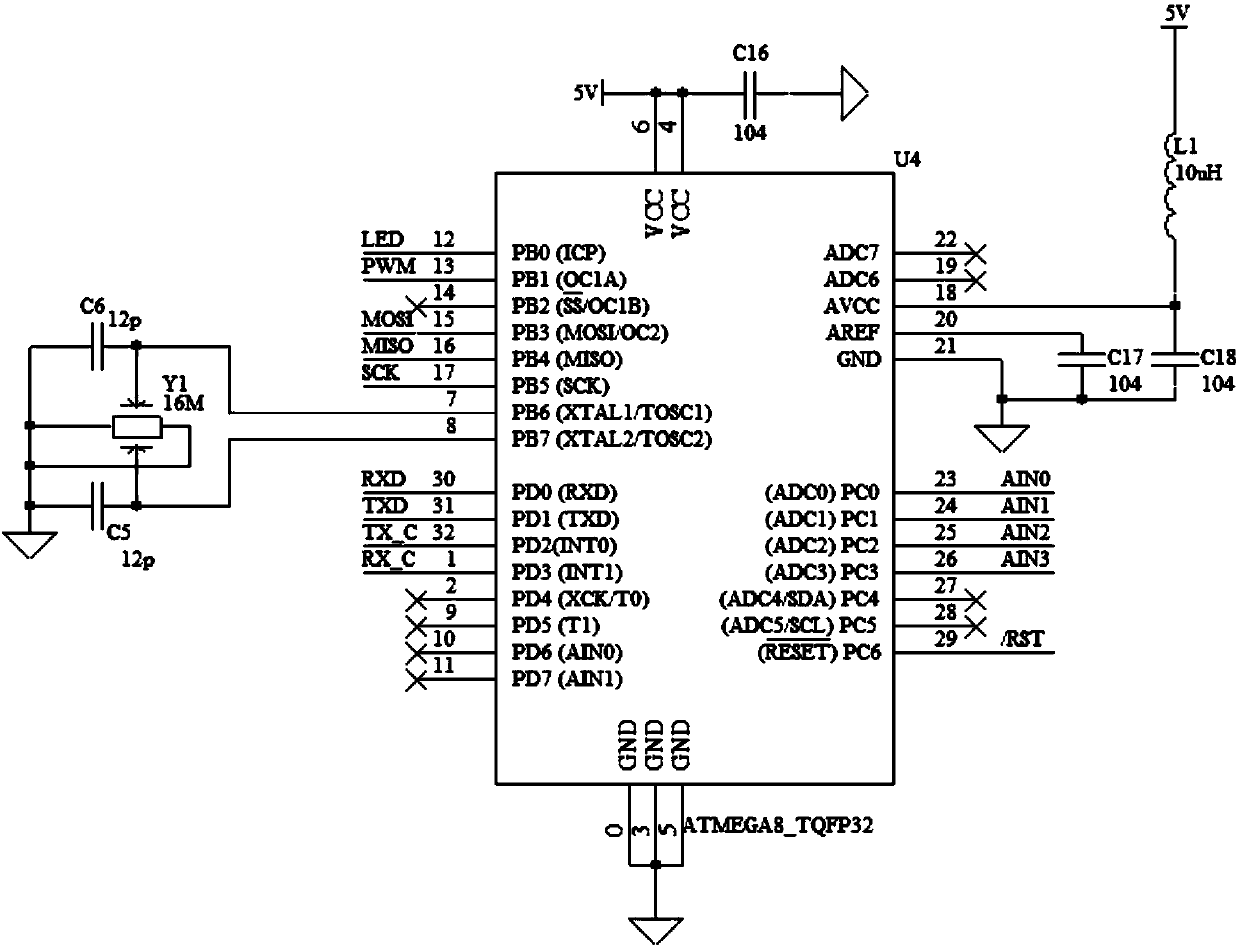
[0040] 2. The steering gear control unit is a steering gear control board with ATMEGA as the main control chip, such as figure 1 As shown in the steering gear control board shown in the figure, it includes actuator control module (including control algorithm), communication module, sensor feedback circuit module, and overcurrent, overvoltage, and protection modules.
[0041] 3. Communication module: The steering gear adopts asynchronous serial bus communication, which can support up to 254 robot steering gears to form a chain connection through the bus to communicate with the upper computer without interfering with each other. Each servo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More