

Air brick stacking manipulator system and control method
A technology of manipulators and adobes, which is applied in the field of stacking devices, can solve the problems of loss of running accuracy, high maintenance and replacement costs, and rigid program movements, and achieve the effects of overcoming relatively rigid movements, high repeat positioning accuracy, and enhanced movement continuity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The present invention will be further explained below in conjunction with the accompanying drawings and specific embodiments. It should be understood that these embodiments are only used to illustrate the present invention and are not intended to limit the scope of the present invention. After reading the present invention, those skilled in the art all fall within the appended claims of the present invention to the modification of various equivalent forms of the present invention limited range.
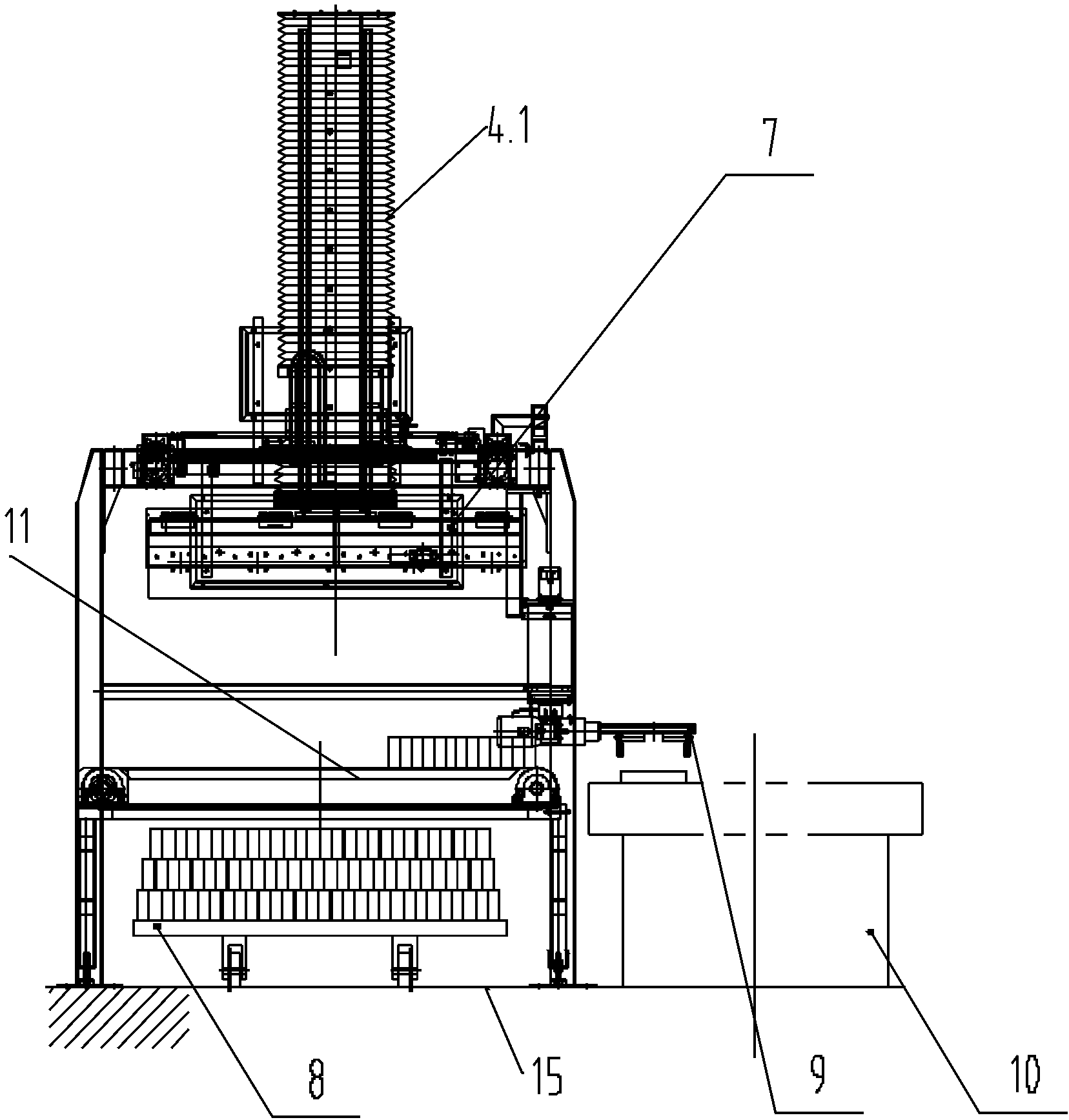
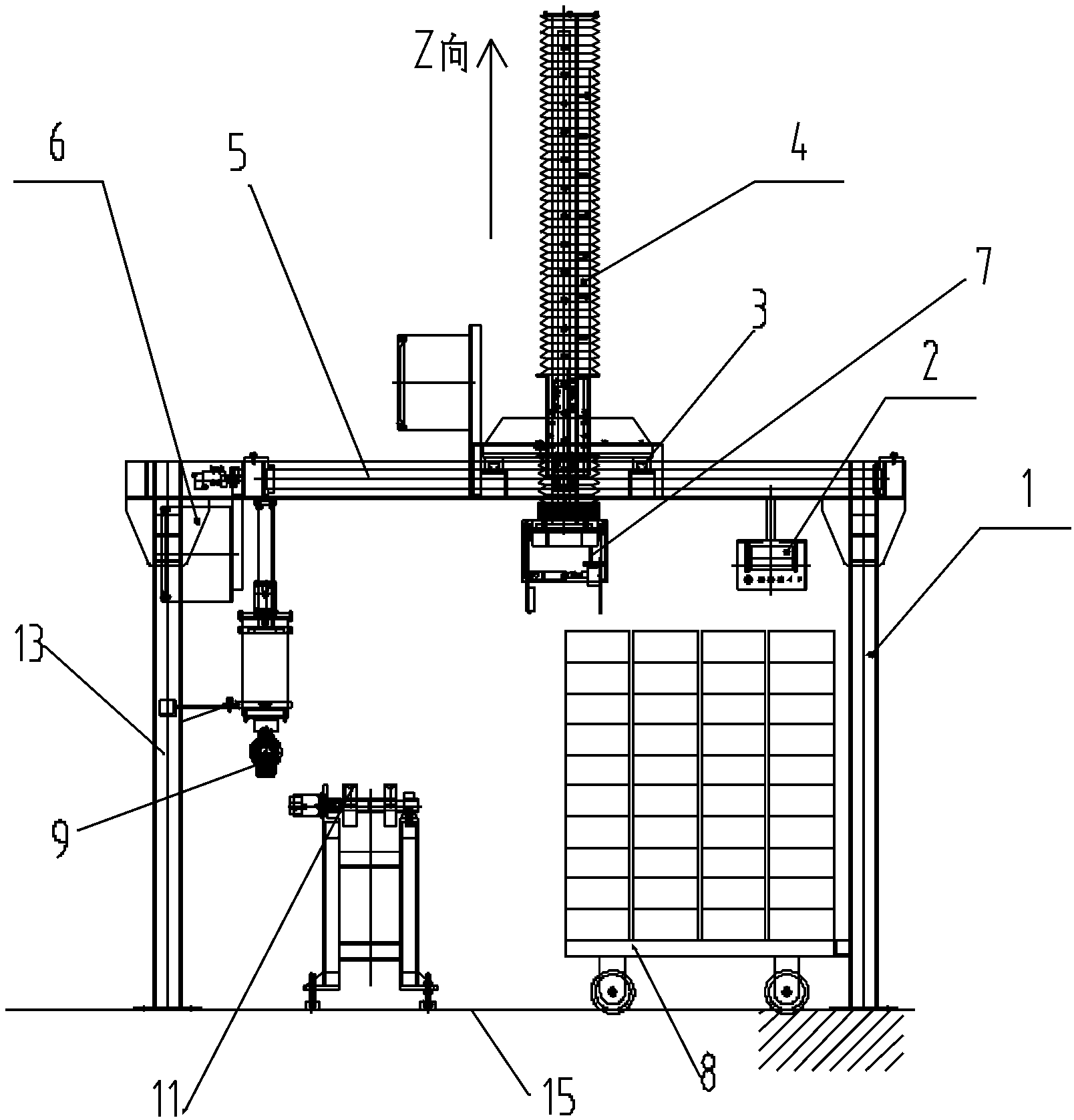
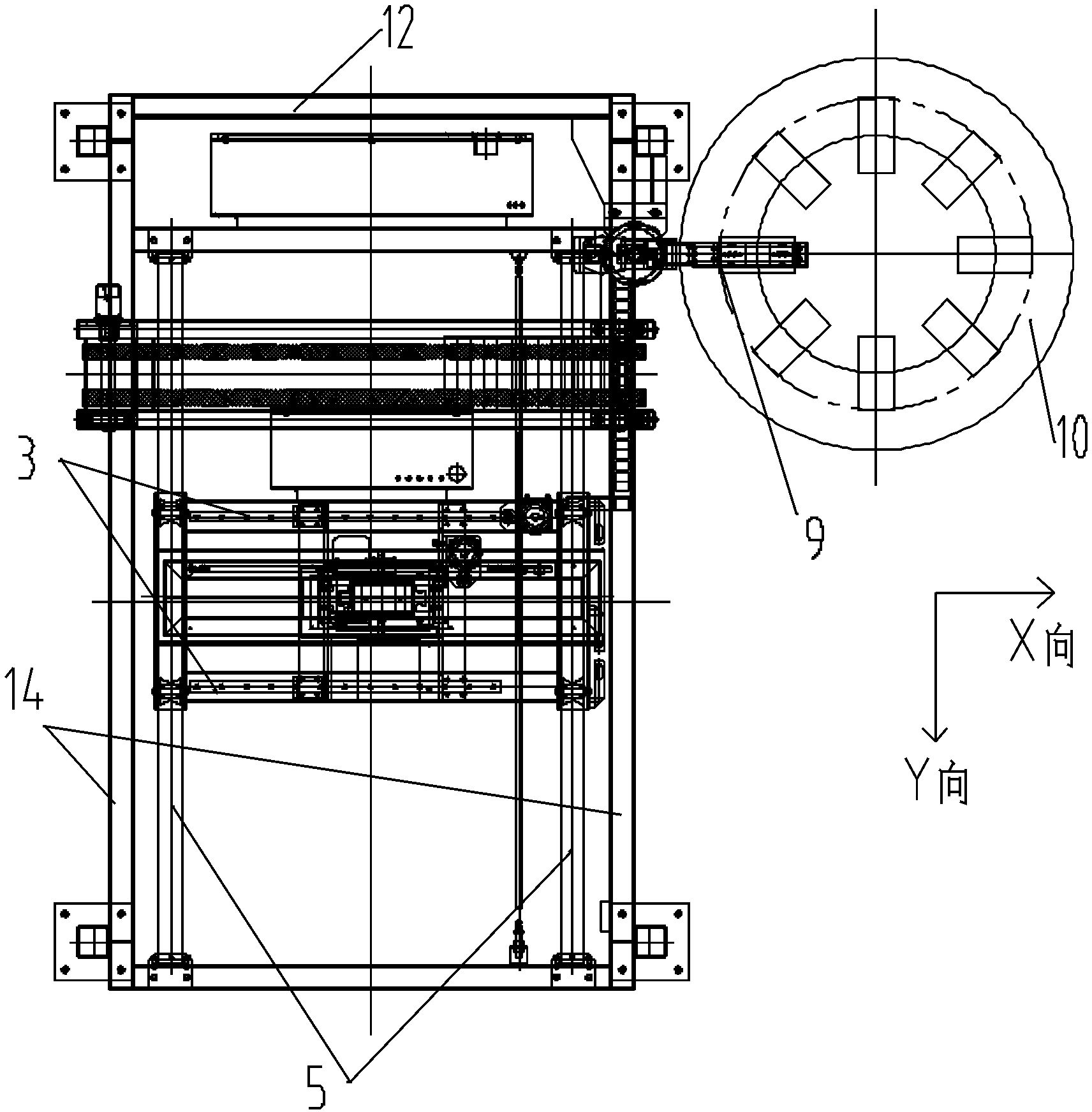
[0048] Such as Figure 1-7 As shown, the adobe stacking manipulator system according to the present invention includes a gantry 1, a small manipulator 9 and a large manipulator 7 suspended upside down on the gantry 1; a belt conveyor 11 is also provided on the ground below the gantry 1, The belt conveyor 11 is docked with the small manipulator 9 and the big manipulator 7 respectively, and is used to receive the adobes grabbed by the blocks by the small manipulator 9 and make t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More