

An air-ground cooperative UAV perception and avoidance system and its avoidance method
A technology of air-ground coordination and drones, applied in the field of drones, can solve the problems of unmanned aerial vehicle threat assessment and evasive decision-making
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0062] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
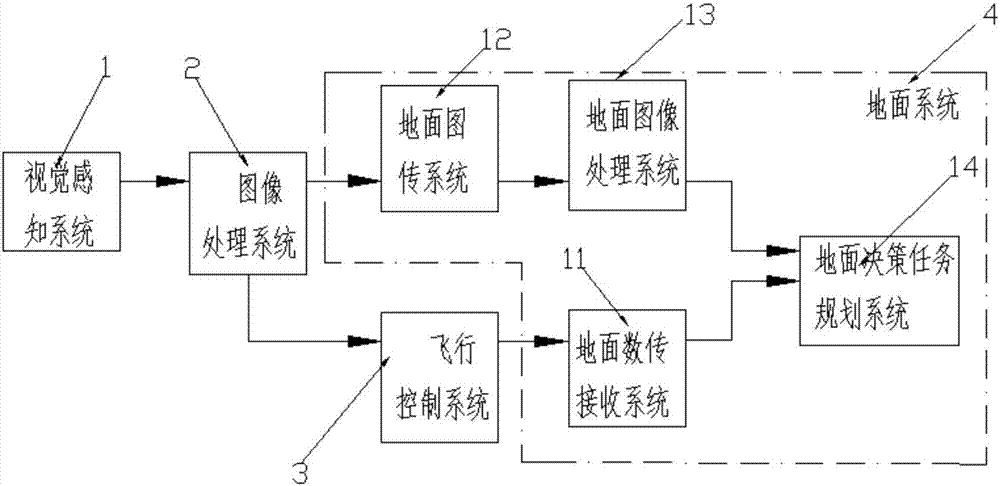
[0063] The present invention provides an air-ground cooperative UAV perception and avoidance system, such as figure 1 As shown, it includes a visual perception system 1, an image processing system 2 and a flight control system 3 installed on the aircraft; the visual perception system is used to collect the image information of the target, and then transmits it to the image processing system 2, and the image processing system 2 converts the image information of the target The image information is output in two ways, one is to directly transmit the unprocessed image information to the ground system 4; the other is to transmit the processed target waypoint information to the flight control system 3, and the flight control system 3 and the ground system 4 interactions.
[0064] The ground system 4 includes a ground data transmission receiving system 11, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More