

Perception and avoidance method and system based on visual servoing
A visual servo and visual technology, applied in two-dimensional position/channel control, etc., can solve the problems of unfavorable light and small UAV system integration applications, large power consumption, and large sensor volume
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0084] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
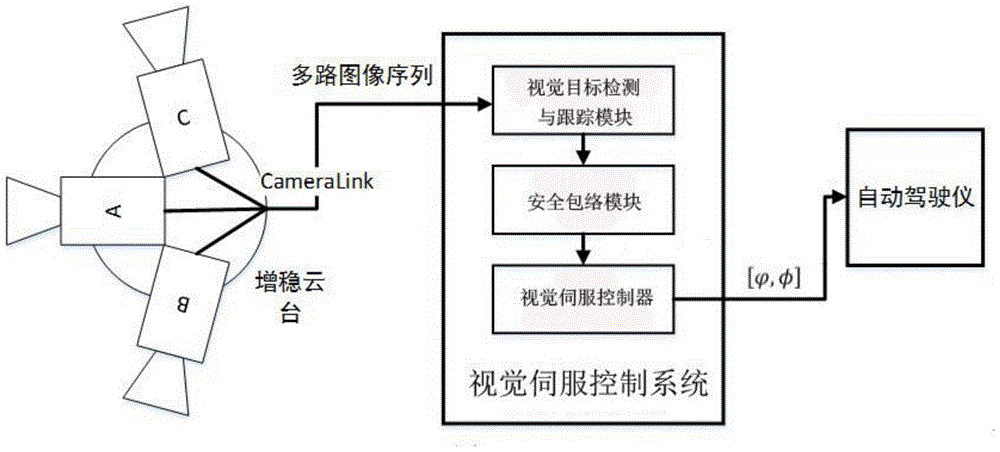
[0085] Such as figure 1 As shown, the present invention provides a visual servo-based perception and avoidance system, including:
[0086] An unmanned aerial vehicle, an autopilot is set on the unmanned aerial vehicle, and the automatic pilot receives flight control instructions to fly and complete the avoidance action of the unmanned aerial vehicle to obstacles;
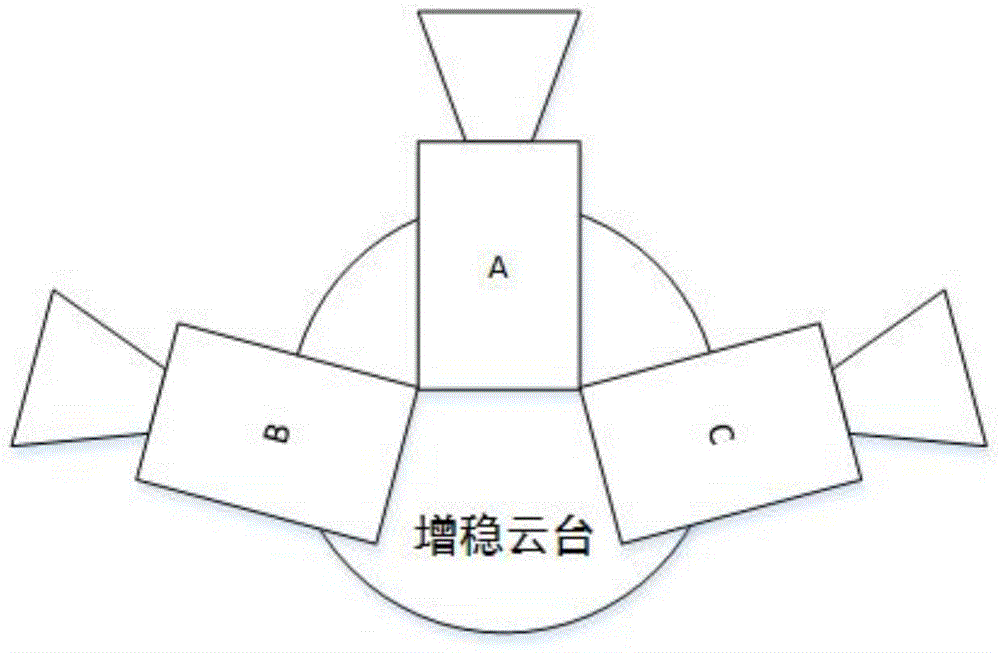
[0087] The image acquisition system is mounted on the unmanned aerial vehicle and is used to acquire the flight airspace image information of the unmanned aerial vehicle, adopts a multi-camera multi-view centralized array configuration, and transmits image information in real time through the camera interface;
[0088] The visual servo control system is arranged on the unmanned aerial vehicle and includes a visual target detection and tracking module, a safety envelope module and a visual se...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More