

A humanoid robot foot
A humanoid robot and foot technology, applied in the field of bionic machinery, can solve the problems of complex control system, poor robot walking gait adjustment ability, less freedom of foot structure, etc., so as to improve walking speed and stride, and enhance adaptation. Ability, the effect of absorbing ground impact
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
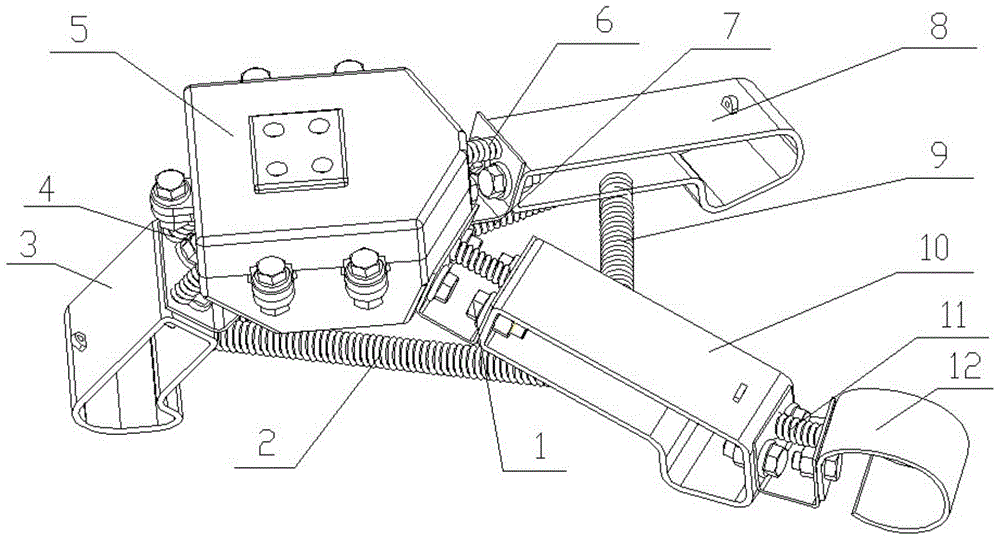
[0029] see figure 1 , the structural form of humanoid robot foot in the present embodiment is:
[0030] An upper plate is set as the talus 5, the rear end surface of the talus 5 is a plane, and the front end surface of the talus 5 is in the shape of a "V" when viewed from above. Three support points are formed for the talus 5 on the rear end surface and the front end surface of the talus 5; the three rods are respectively:
[0031] The calcaneus 3, the upper end of which is supported on the rear end surface of the talus 5 through the heel joint 4;
[0032] Inner metatarsal bone 10, the upper end of which is supported on the medial front face of the talus 5 through the inner metatarsal joint 1;
[0033] Outer metatarsal bone 8, the upper end of which is supported on the outer front face of the talus 5 through the outer metatarsal joint 6;
[0034] Form a rear plantar stress triangle with the lower end of the calcaneus 3 as the rear apex and the pointed head facing backward; ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More