

Structure-state-variable mechanism and spinor adjacent matrix method for characteristic analysis of structure-state-variable mechanism
A technology of adjacency matrix and characteristic analysis, which is applied in the direction of manipulators and manufacturing tools, can solve problems such as the inability to express the geometric structure of robot mechanisms and the inability to analyze the degree of freedom of mechanisms, so as to enrich the theory of robot mechanisms and improve efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] In order to further illustrate the technical means and functions adopted by the present invention to achieve the intended purpose, the present invention will be described in detail below in conjunction with the accompanying drawings and preferred embodiments.
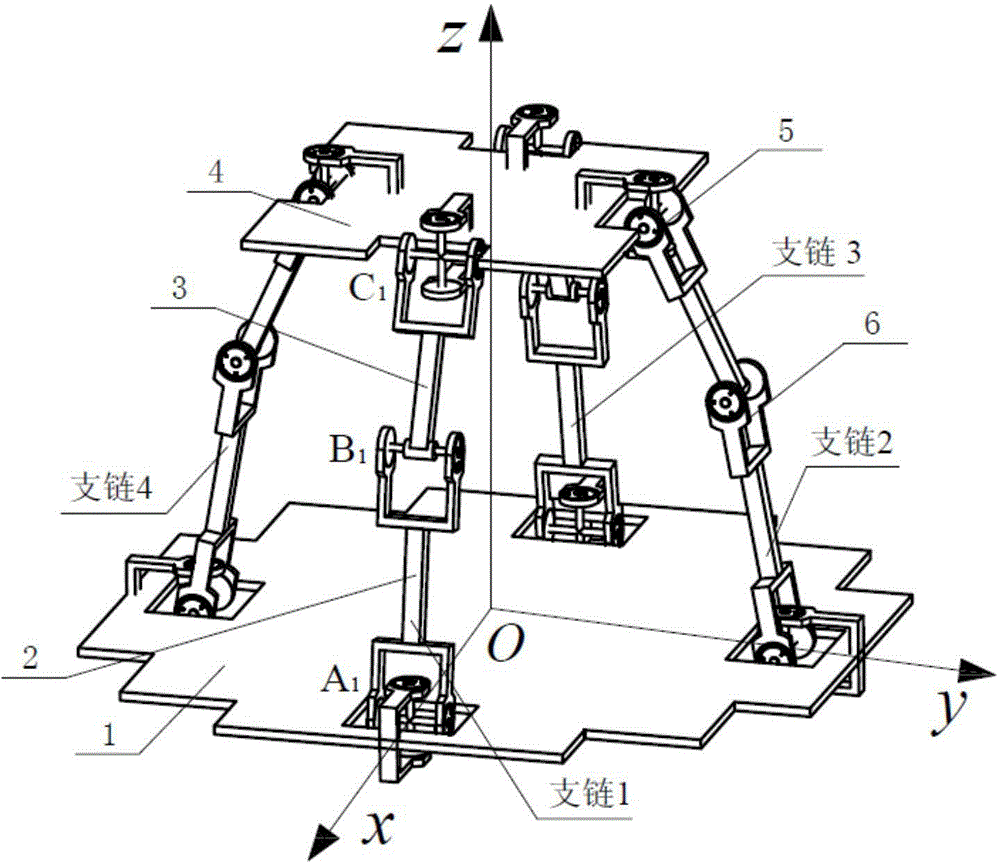
[0028] Such as figure 1 Shown is a 4-URU configuration variable parallel mechanism, this mechanism has 4 branches, the lower platform is the fixed platform 1, the upper platform is the moving platform 4, and the moving platform connected with the fixed platform 1 and the moving platform 4 The pairs are distributed on the midpoint of the side length of the square, and the centers of the U pairs 5 in the deformed state are respectively located in the planes of the fixed platform 1 and the moving platform 4 . In each branch, the kinematic pairs are sequentially composed of variable configuration U pair 5, variable configuration R pair 6, and variable configuration U pair 5. The two length members are member a2 and m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More