

High-sensitivity intelligent robot skin
An intelligent robot and sensitivity technology, which is applied in the field of intelligent sensing, can solve the problems of the tactile sensor being heavy, not high enough, and unable to have both the flexibility of human skin and the characteristics of multidimensional sensitivity.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The scheme of this application is further described in conjunction with the accompanying drawings as follows:
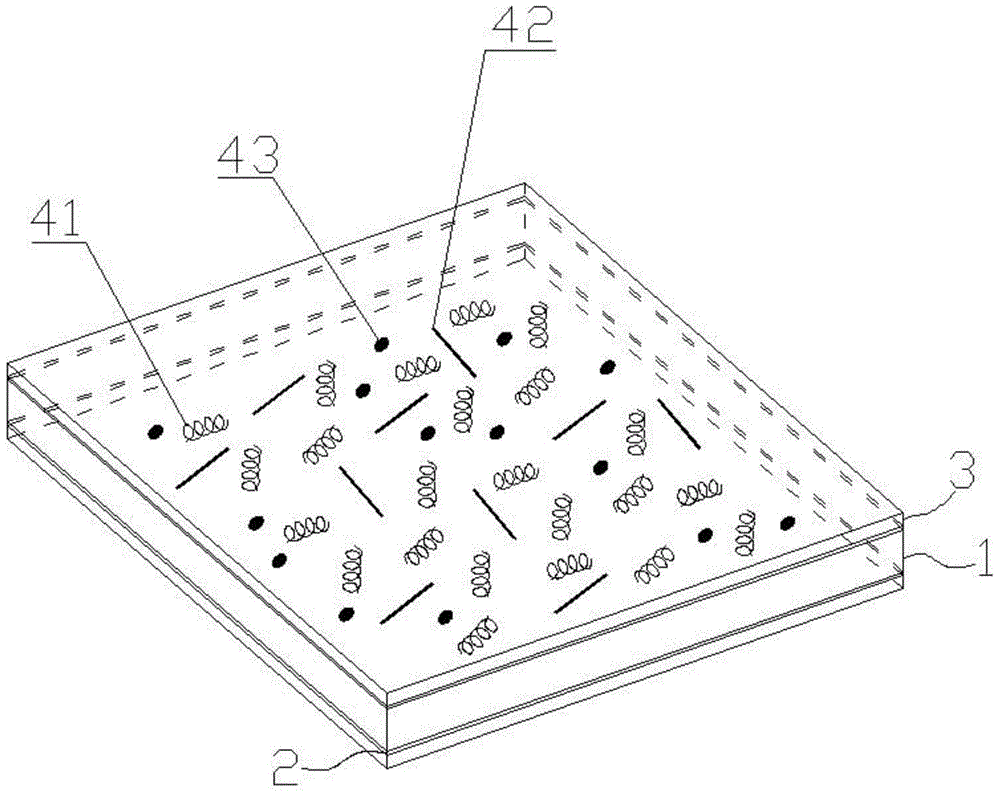
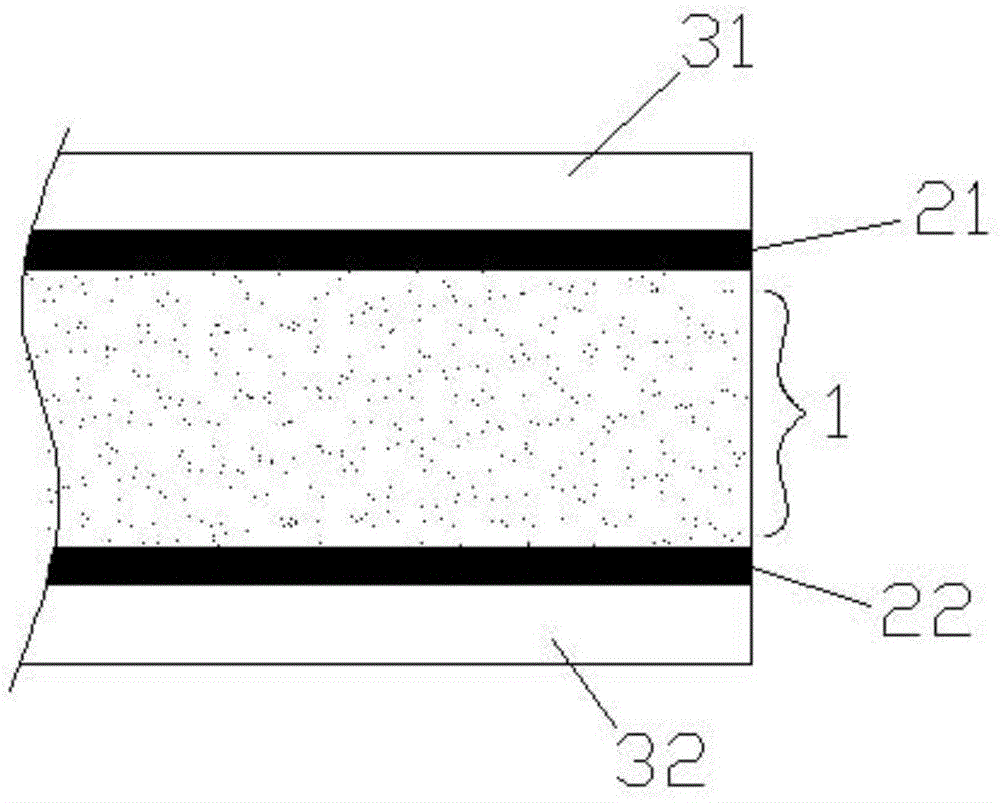
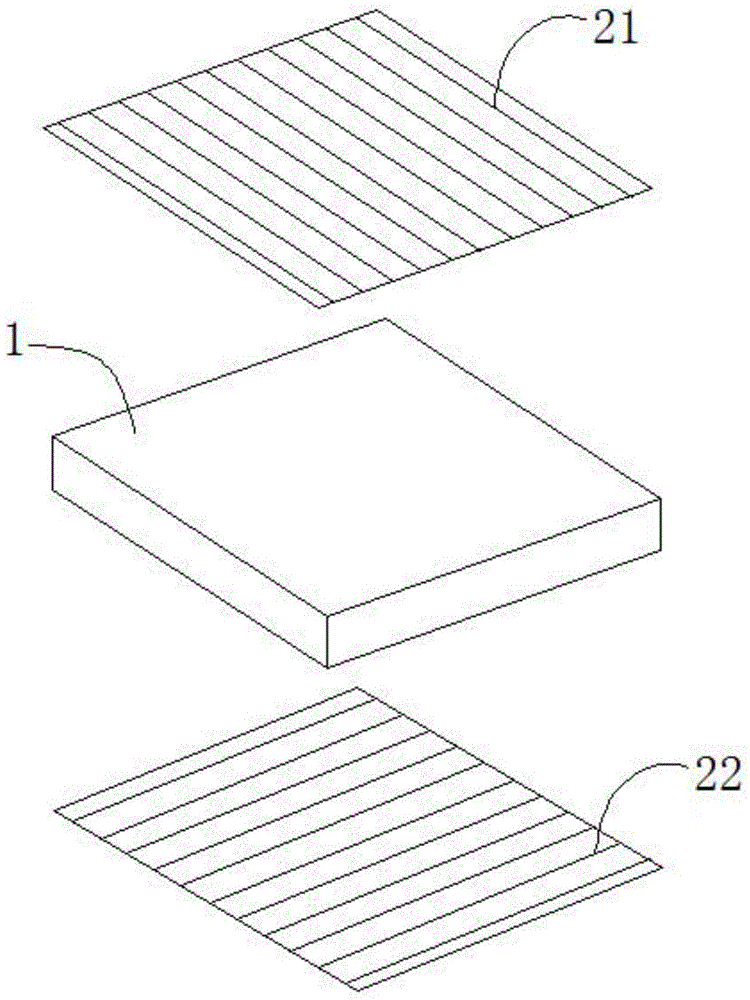
[0023] like figure 1 , 2 As shown in and 3, a high-sensitivity intelligent robot skin includes a composite layer 1 formed by doping a conductive monomer with a polymer in a certain proportion, plated on the electrode layer 2 on both sides of the composite layer 1, and wrapped in the electrode layer. The outer layer 3 on the outside of the layer 2, the conductive monomer includes conductive microsprings 41, conductive fibers 42 and conductive particles 43; among the present embodiment, the conductive fibers 42 are rod-shaped carbon fibers, and the conductive particles 43 are Carbon black and conductive monomers are randomly doped in the composite layer 1 , specifically, the conductive fibers 42 and conductive particles 43 are distributed in the gaps of the conductive microsprings 41 .
[0024] The composite layer 1, the electrode layer 2 and the outer layer 3...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More