

All-flexible resistive touch and pressure perception sensor and manufacturing method thereof
A tactile perception and sensor technology, applied in the field of sensing, can solve problems such as insufficient stress detection sensitivity and accuracy, and achieve the effects of improving surface adaptability, avoiding cumbersome wiring, and improving resolution and sensitivity.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
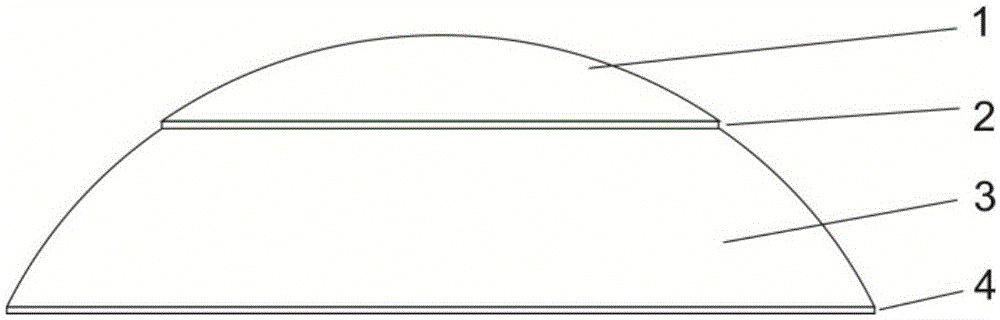
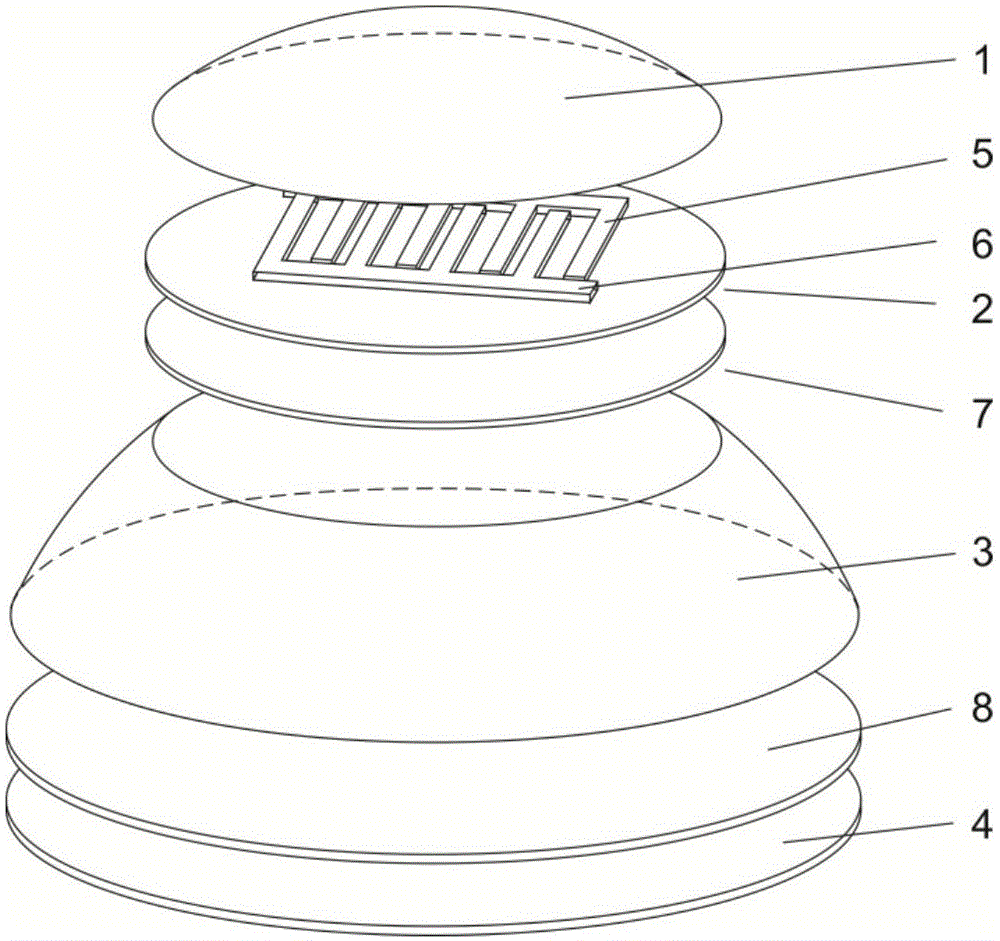
[0032] like figure 1 and figure 2 As shown, the overall structure of the fully flexible resistive touch-pressure sensing sensor of this embodiment is flat hemispherical, which is convenient for all parts of the sensor to feel the external force evenly. The height is 5mm, the bottom radius is 10mm, and the curvature radius is 12.5mm; The tactile sensing sensor for sensing the external force in the small range and the pressure sensing sensor for sensing the external force in the large range in the lower layer;
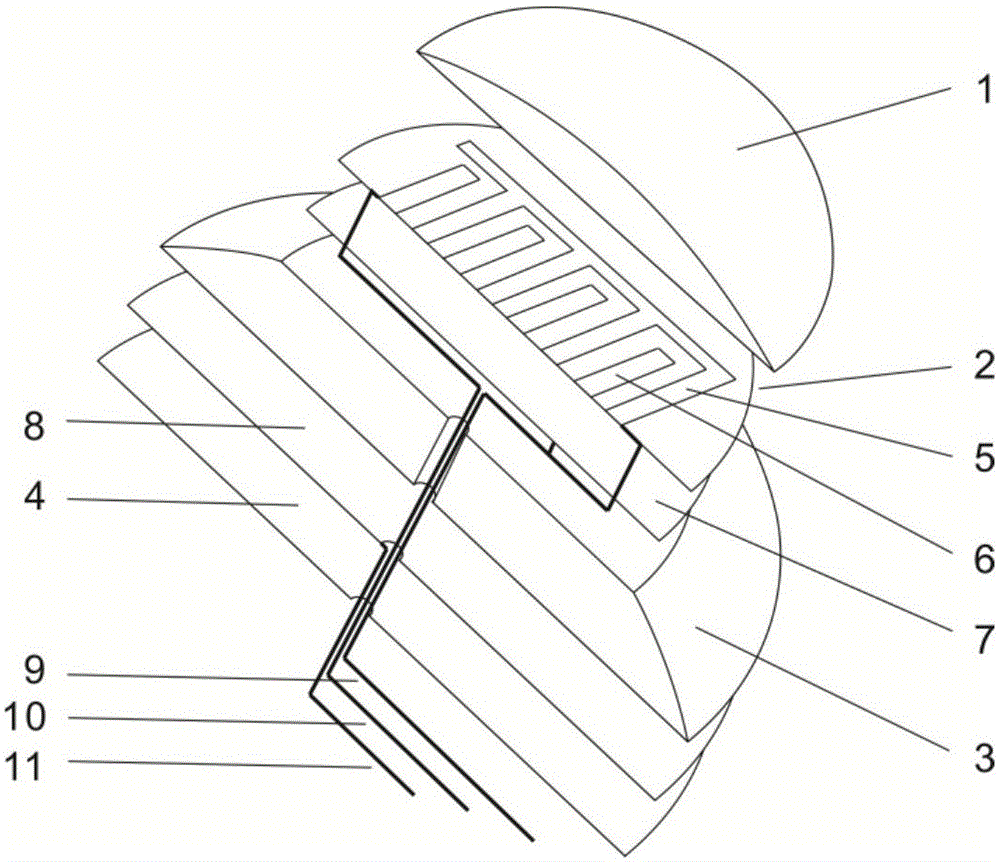
[0033] The tactile sensing sensor uses graphene / carbon black filled silicone rubber 1 as a sensitive material, adopts an interdigitated electrode structure on the same surface, and the flexible interdigitated electrodes on the upper surface of the upper flexible substrate 2 are used as electrodes;
[0034] The pressure sensing sensor includes carbon nanotubes / carbon black filled silicone rubber 3 as a sensitive material, adopts an upper and lower electrode structure, a...
PUM
| Property | Measurement | Unit |
|---|---|---|
| height | aaaaa | aaaaa |
| radius | aaaaa | aaaaa |
| radius | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More