

Simultaneous localization and mapping and inertial navigation combined error fusion system
A technology of inertial navigation and combined errors, applied in the direction of measuring devices, instruments, etc., can solve problems such as increasing errors in mapping and azimuth recognition, increasing feedback delays, affecting robot positioning and navigation functions, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
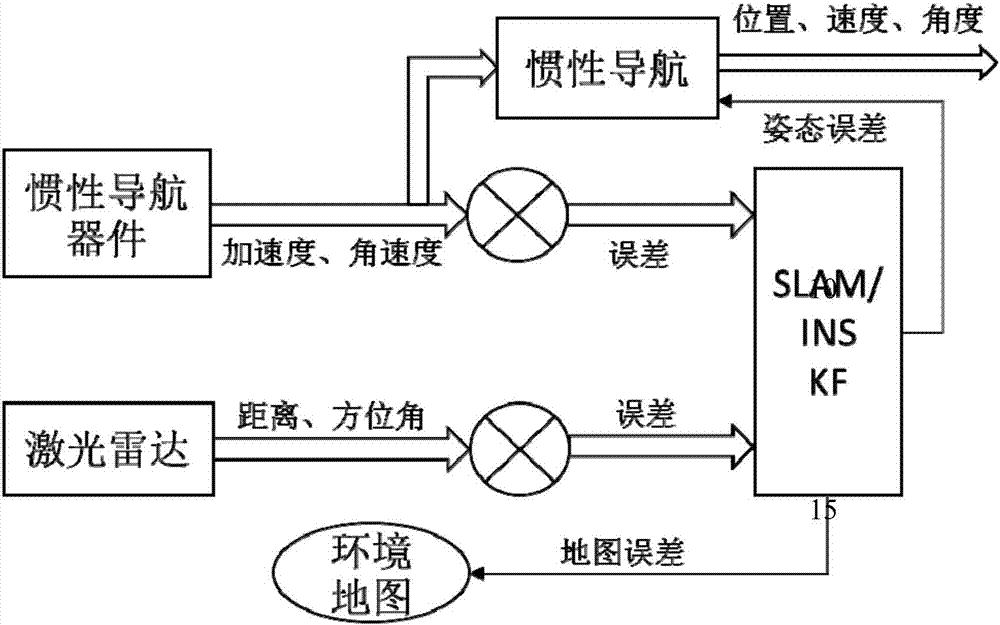
[0074] The present invention mainly aims at robot intelligent carrying and navigation, and has invented a combined error fusion system of concurrent mapping positioning and inertial navigation. The device and its operation flow chart are as follows figure 1 as shown,
[0075] A combined error fusion system for concurrent mapping and positioning and inertial navigation, including a carrier, an inertial navigation device, a concurrent mapping and positioning device, and an error fusion device; the inertial navigation device includes an accelerometer, a gyroscope, and an inertial navigation drive device, the concurrent mapping positioning device includes a laser radar and an environmental map construction device; the error fusion device includes a linear discrete concurrent mapping positioning error module, an inertial navigation error module and a weighted fusion module;
[0076] In the inertial navigation device, the accelerometer obtains the acceleration of the vehicle, the g...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More