

A laser marking robot
A laser marking and robotic technology, applied in the field of laser marking, can solve the problems of high risk, high operation difficulty, and increased marking operation cost, so as to avoid congestion and blockage, reduce personnel participation, and shorten cycle time Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
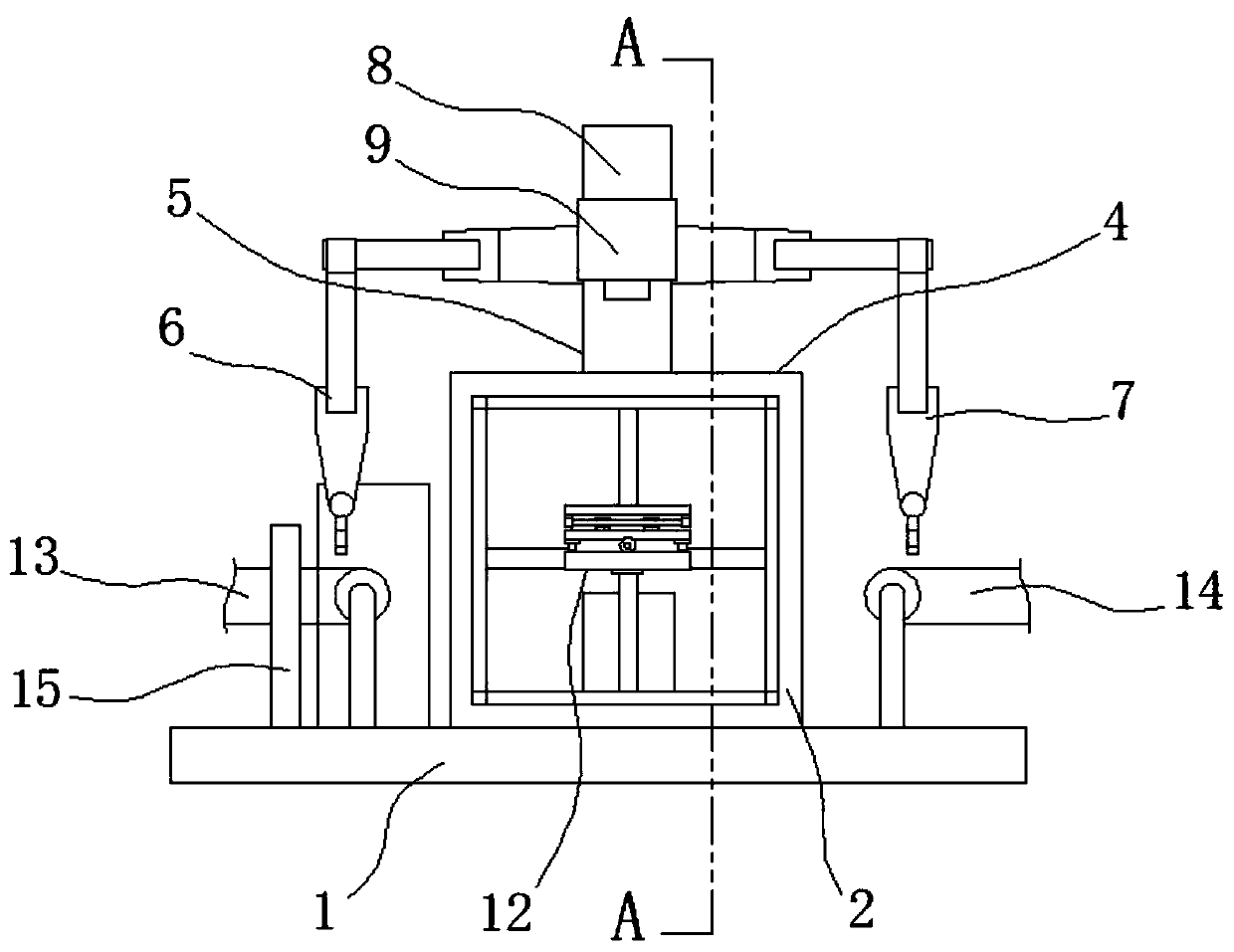
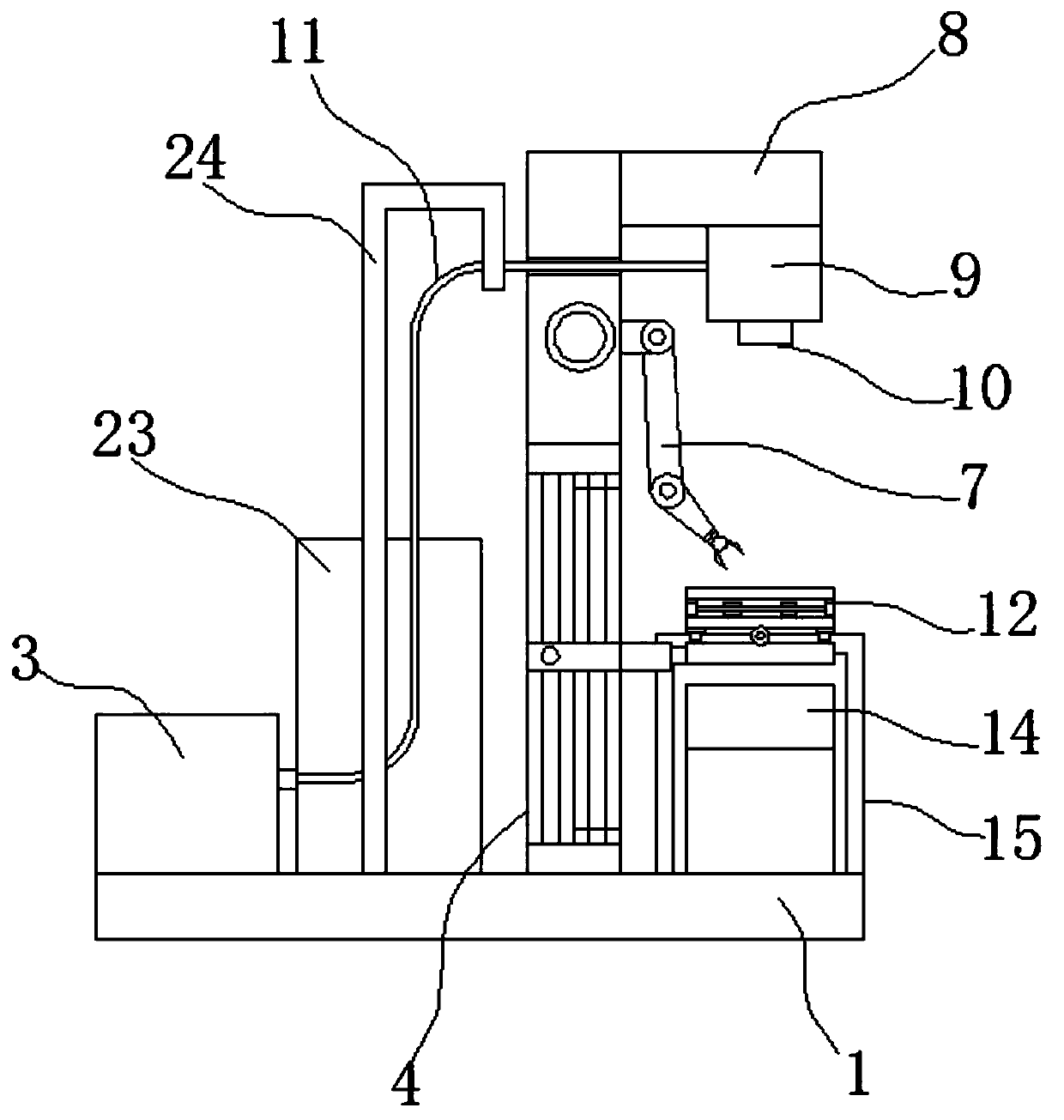
[0022] Such as Figure 1-4 As shown, a laser marking robot includes a base 1. The base 1 is provided with a robot body 2, a control host 23, and an optical fiber marking machine host 3. The robot body 2 includes a three-dimensional translation mechanism 4 connected to the base 1. The three-dimensional translation The upper end of the mechanism 4 is connected with a column 5, the left and right ends of the column 5 are respectively connected with the first mechanical arm 6 and the second mechanical arm 7, the upper front side of the column 5 is connected with a beam 8, and the lower side of the front end of the beam 8 is connected with a The vibrating mirror 9 is connected to the field mirror 10 at the lower end of the vibrating mirror 9, and the vibrating mirror 9 is connected to the host machine 3 of the fiber marking machine through the optical fiber 11. It is worth mentioning that the base 1 is provided with a balance bracket 24 for erecting the optical fiber 11, And a heat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More