

Robot dynamics model identification method
A dynamic model and identification method technology, applied in the field of robot dynamics model, can solve the problems of low identification accuracy and poor consistency of robot dynamics model parameters, and achieve the effect of improving identification accuracy, good consistency and high accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] The method of the present invention is further described below in conjunction with the accompanying drawings. This embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following Example.
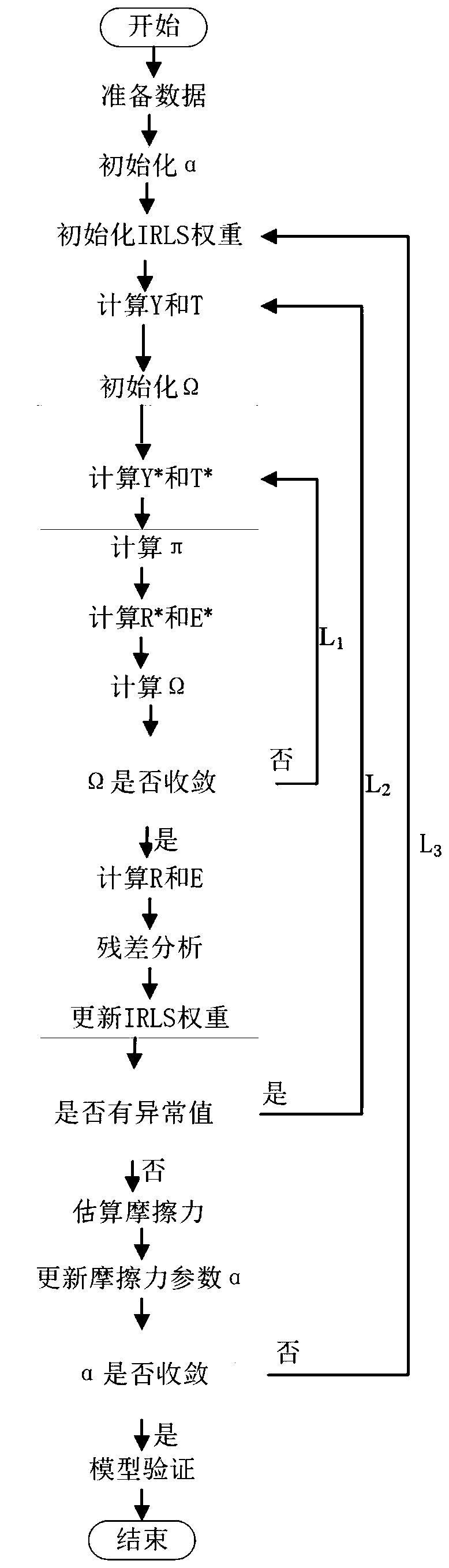
[0062] The robot of this embodiment is the Foxconn robot whose model is A-05-2, and its six joints are all rotary joints, and the controller used in the embodiment is the MicroLabBox of dSPACE Company, such as figure 1 As shown, this embodiment includes the following steps:
[0063] Step 1, prepare data, collect the torque command of each joint and the feedback position of the joint encoder; let the robot track the excitation curve optimized in advance, record the joint torque command and the feedback position of the encoder at the same time, and then use the Butterfly with zero phase delay ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More