

Data set construction method and device based on unmanned aerial vehicle instruction sequence and terminal equipment
A technology of instruction sequence and construction method, applied in the field of data set construction, can solve problems such as complex calculation, difficult debugging and optimization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
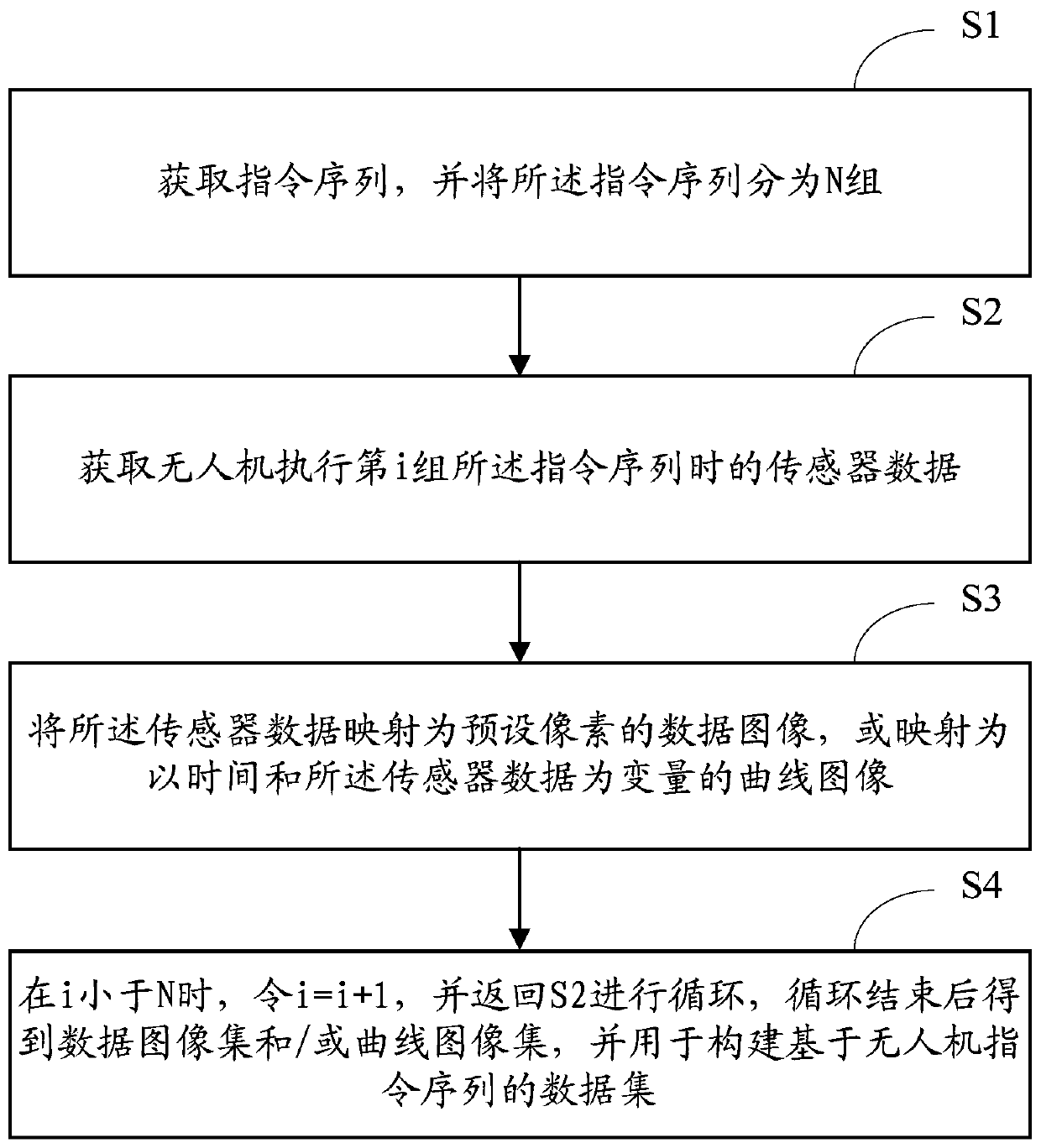
[0051] Such as figure 1 As shown, Embodiment 1 of the present invention provides a method for constructing a data set based on the command sequence of the drone, including but not limited to the following steps:
[0052] S1. Obtain an instruction sequence, and divide the instruction sequence into N groups, where N is a positive integer.
[0053] In the above step S1, each time the drone flies, a set of specified instruction sequences are executed.
[0054] In a specific application, the grouping of instruction sequences can be divided according to the actual flight scene of the UAV.
[0055] S2. Obtain sensor data when the drone executes the instruction sequence described in the i-th group, i is a positive integer less than or equal to N, and the initial value of i is 1.
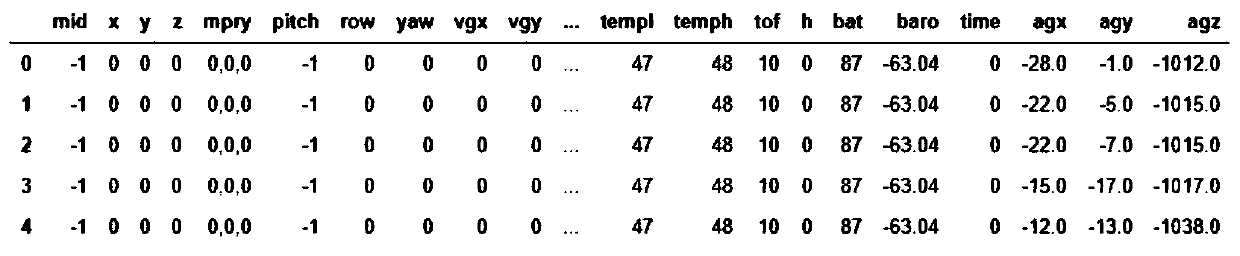
[0056] In the above step S2, it is assumed that during the flight process of the UAV executing the command sequence, the measurement value of the TOF distance in the sensor is collected at a collection fre...
Embodiment 2
[0084] In the embodiment of the present invention, the process of mapping out the data image in step S3 of the first embodiment is described.
[0085] Such as Figure 5 As shown, in the embodiment of the present invention, the normalized data processing in step S3 to map the sensor data into a data image of preset pixels includes:
[0086] S311. Normalize the sensor data to obtain M pieces of normalized sensor data;
[0087] In the above step S311, the normalized sensor data is in the range of [0,1], so a color image can be mapped.
[0088] Wherein, M is a positive integer.
[0089] S312. Save the M pieces of normalized sensor data as the data images of preset pixels.
[0090] Wherein, any piece of normalized sensor data corresponds to a pixel of the data image.
[0091] In one embodiment, S312 includes:
[0092] Set the same matrix as the preset pixel;
[0093] The normalized sensor data is sequentially filled into the matrix.
[0094] Taking the sensor data as TOF dat...
Embodiment 3
[0099] The embodiment of the present invention describes the process of mapping the curve image in step S3 of the first embodiment.
[0100] Such as Figure 6 As shown, in the embodiment of the present invention, the mapping of the sensor data to a curve image with time and the sensor data as variables through the neural network in step S3 includes:
[0101] S321. Acquire sensor sample data and data sample images.
[0102] Wherein, the sample image includes a curve image corresponding to the sensor sample data.
[0103] S322. Input the sensor sample data and the sample image into the neural network for training, and record training network parameters when the image output by the neural network is similar to the sample image.
[0104] S323. Repeat training the neural network according to different sensor sample data and data sample images to obtain a training network parameter set.
[0105] S324. Optimize the neural network according to the training network parameter set to ob...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More