

A cooperative control method of spacecraft anti-jamming attitude based on event-triggered communication
An event-triggered and collaborative control technology, which is applied in the direction of aerospace vehicles, aerospace vehicle guidance devices, aircraft, etc., can solve the problems of heavy communication burden, only considering the communication topology, failing to consider directed graphs, etc., to reduce Communication burden, effect of improving tracking performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] The technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only part of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
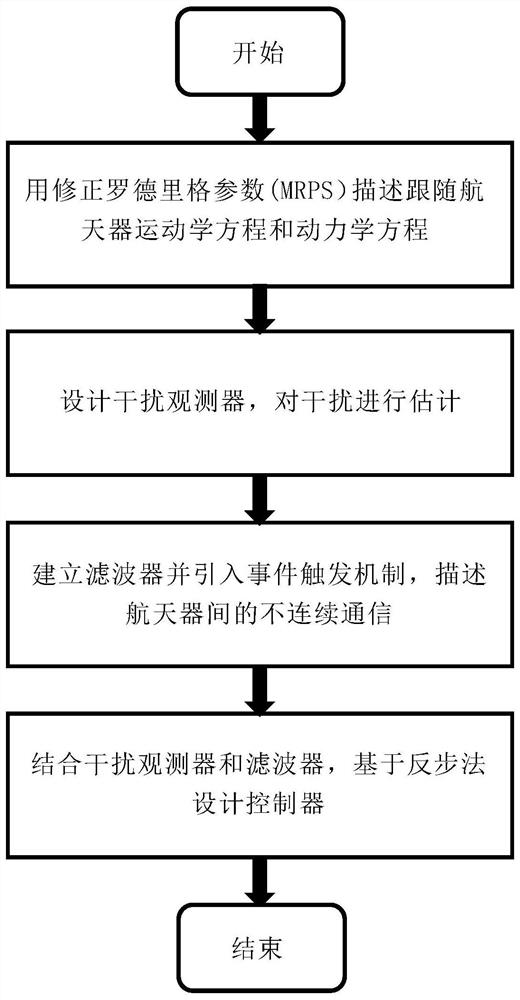
[0058] Such as figure 1 As shown, firstly, for a group of rigid spacecraft including the leader spacecraft and the follower spacecraft, the modified Rodrigue parameters (MRPs) are used to describe the attitude kinematic equations and dynamic equations of the follower spacecraft. Model the unknown bounded interference of the spacecraft, which is used to describe a variety of actual interferences; secondly, design an interference observer to estimate...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More