

Substation unmanned aerial vehicle autonomous inspection system
A technology of inspection system and unmanned aerial vehicle, applied in the direction of control/adjustment system, non-electric variable control, instrument, etc., can solve the problems of high cost and lack of independent inspection, so as to improve accuracy and facilitate use and operation , the effect of extending the service life
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
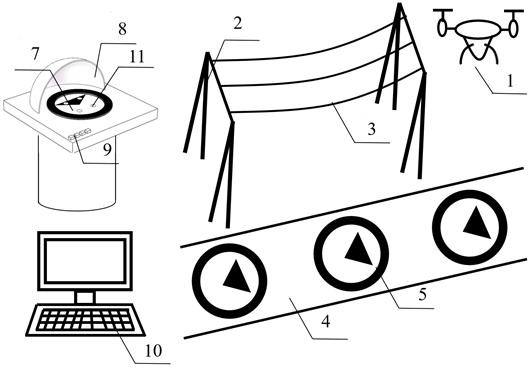
[0055] In this example, the UAV inspection objects are the gantry 2 in the substation and the overhead line 3 in the substation, and the landmarks are set on the ground of the aisle 4 in the substation.
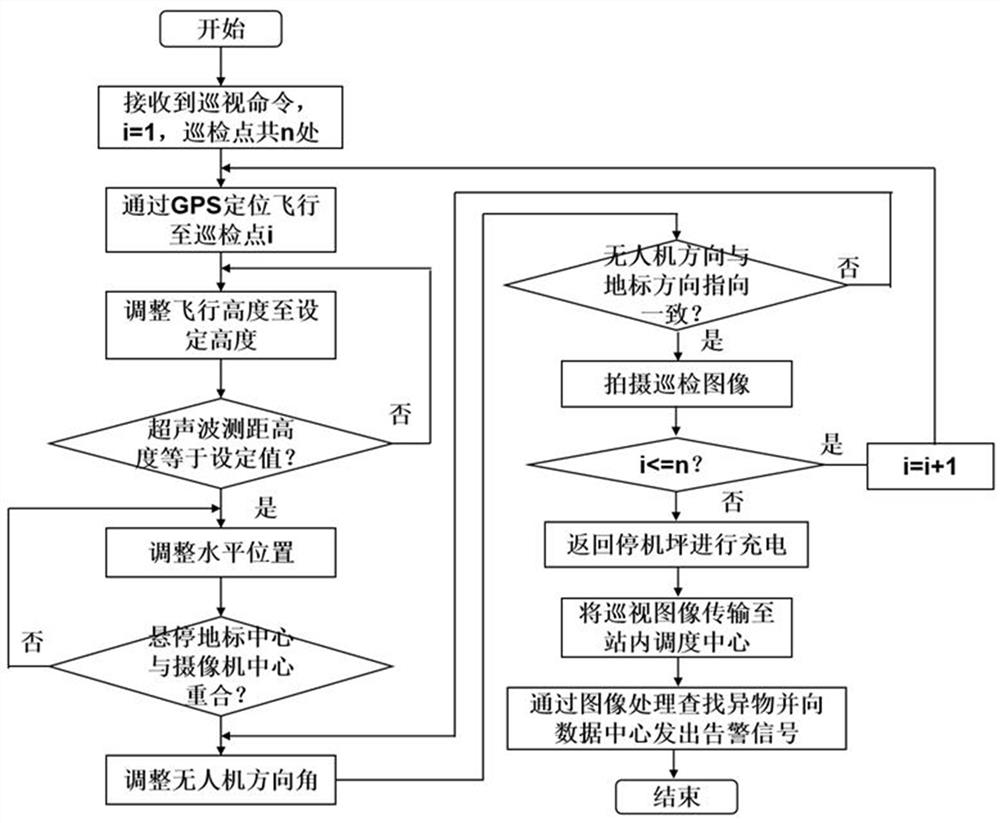
[0056] In order to ensure that the drone can hover at a specific horizontal position during inspection, it is necessary to draw the hovering landmark 5 of the drone at a certain distance in the aisle 4 of the substation. The pixel difference adjusts the horizontal position until the two center points coincide, ensuring that each flight can hover at the same position.
[0057] The inspection UAV is equipped with camera, ultrasonic, GPS and other components. The camera is used for image acquisition. Human-machine flight plans routes and waypoints, and the UAV is equipped with an image processing module to identify the center point and direction of the landmark and use the flight control module to control the UAV to complete flight commands such as navigation, hovering, and auto...
Embodiment 2
[0062] Due to the limited cruise capability of UAVs, it is difficult to maintain multiple inspection tasks with one charge. In order to reduce human intervention and improve endurance, the UAV parking apron is designed for autonomous return and charging. In order to realize the fixed-point and directional landing of UAVs, Landing signs need to be designed to assist the UAV to land at a specific point for autonomous charging. Therefore, according to the characteristics of UAV flight and landing, the hovering landmarks and landing signs are designed as a combination of concentric circles and isosceles triangles.
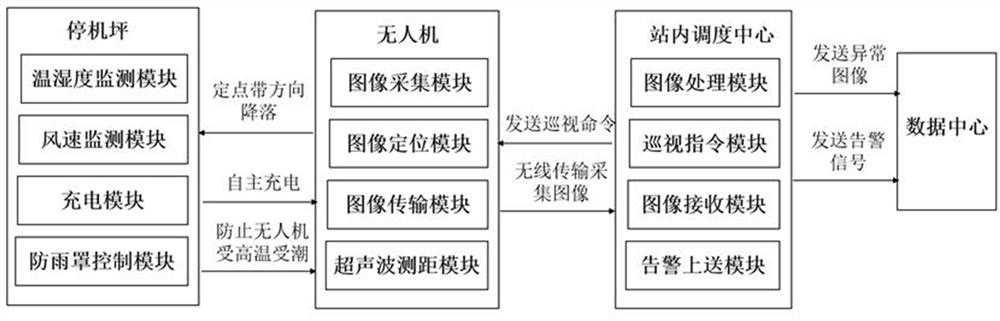
[0063] like figure 1 and Figure 4 As shown, the apron 9 mainly includes an environmental monitoring module (temperature, humidity, wind speed), a landing sign 7 , a protective cover 8 and a charging point (charging module) 11 .
[0064] When the UAV completes an inspection mission, that is, all the images of the inspection points are captured, the autonomous return ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More