

Robot operated on surface of oil storage tank
A technology for working robots and oil storage tanks, which is used in motor vehicles, crawler vehicles, transportation and packaging, etc., can solve the problems of limited adsorption force, inability to install various working tools, and easy disconnection of the crawler when turning.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
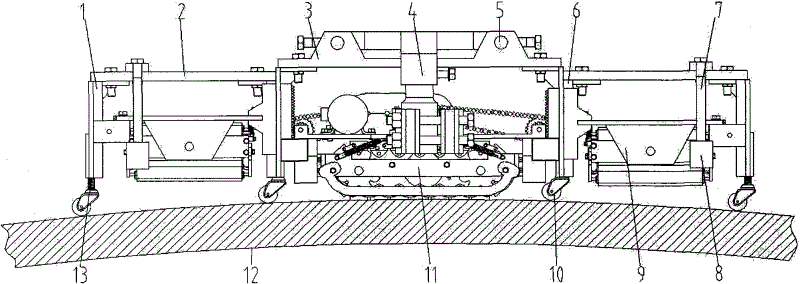
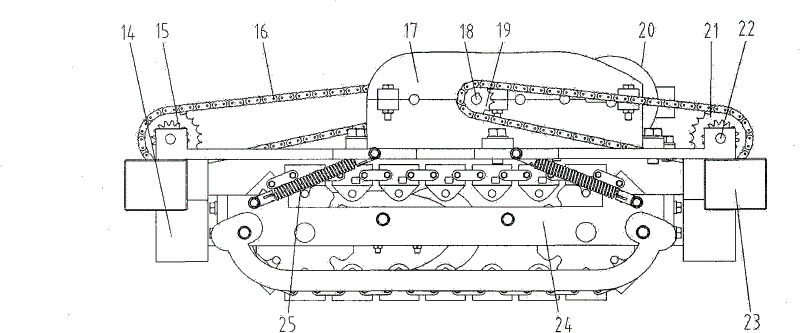
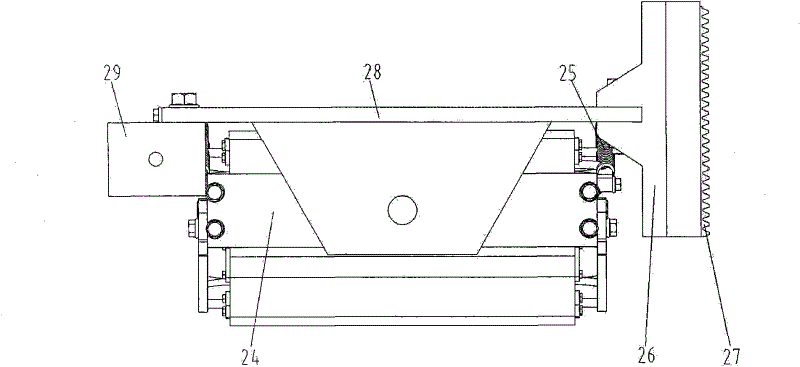
[0023] Attached below Figure 1-7 This embodiment will be described in detail.
[0024] like figure 1 , Figure 4 , Image 6 As shown in the figure, the oil storage tank surface working robot of the present invention has a symmetrical structure, and is mainly composed of a pair of main sliding guide rails 6, a pair of auxiliary sliding guide rails 1, a common installation platform 2, 3, an X travel unit 11, and two Y travel units. 9, composed of 10 eight universal wheels.
[0025] The public installation platform is composed of a main installation platform 3 and two auxiliary installation platforms 2. Each platform is respectively connected with the corresponding main sliding guide rail 6 and auxiliary sliding guide rail 1 with screws; two sliding rods 5 are installed on the main installation platform 3. The common installation sliding block 4 is slidably connected with the sliding rod 5, and the sliding adjustment screw 44 adjusts the sliding position of the common instal...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More