

Fruit picking end effector and fruit picking method
An end effector, fruit harvesting technology, applied in the field of agricultural robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
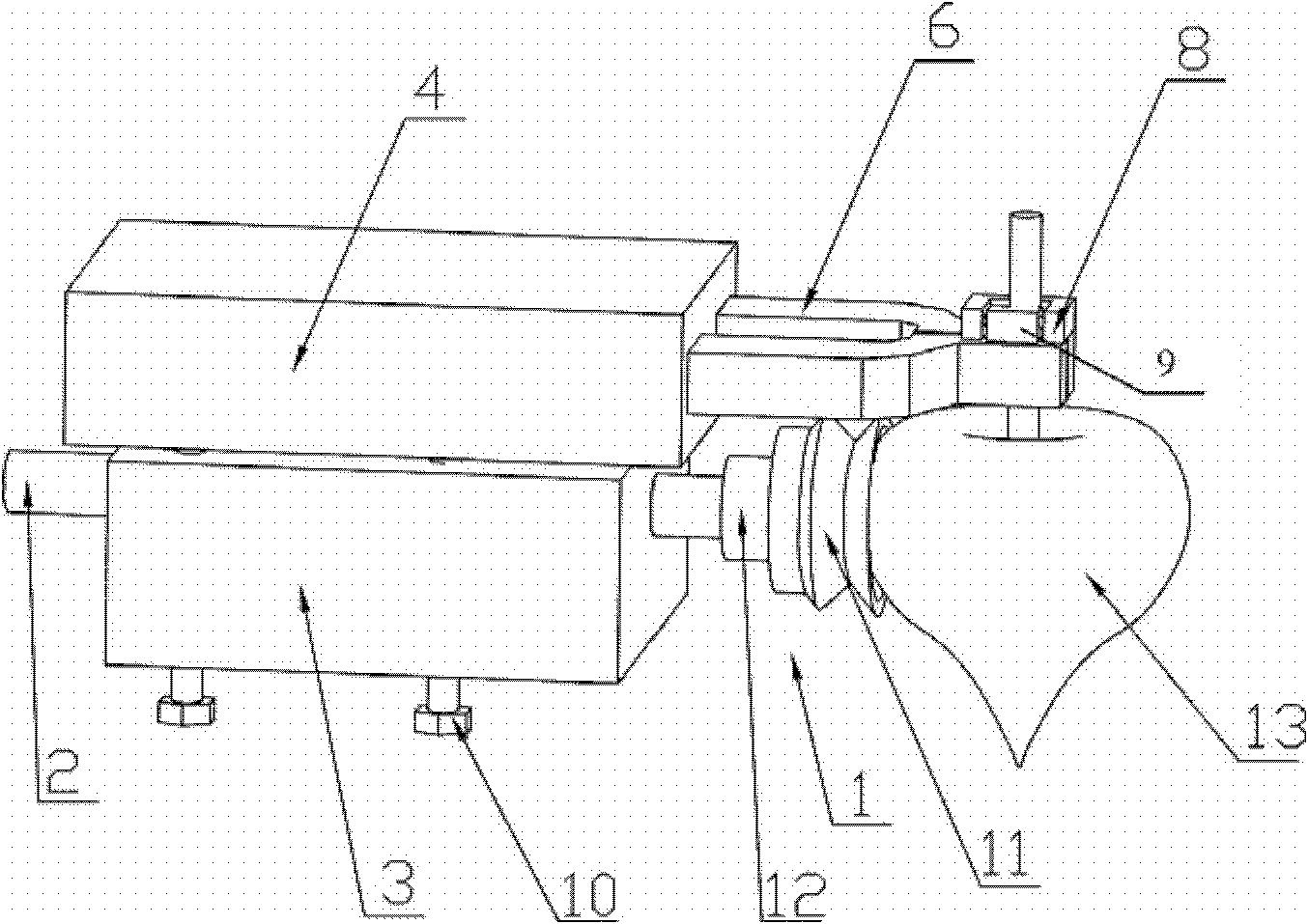
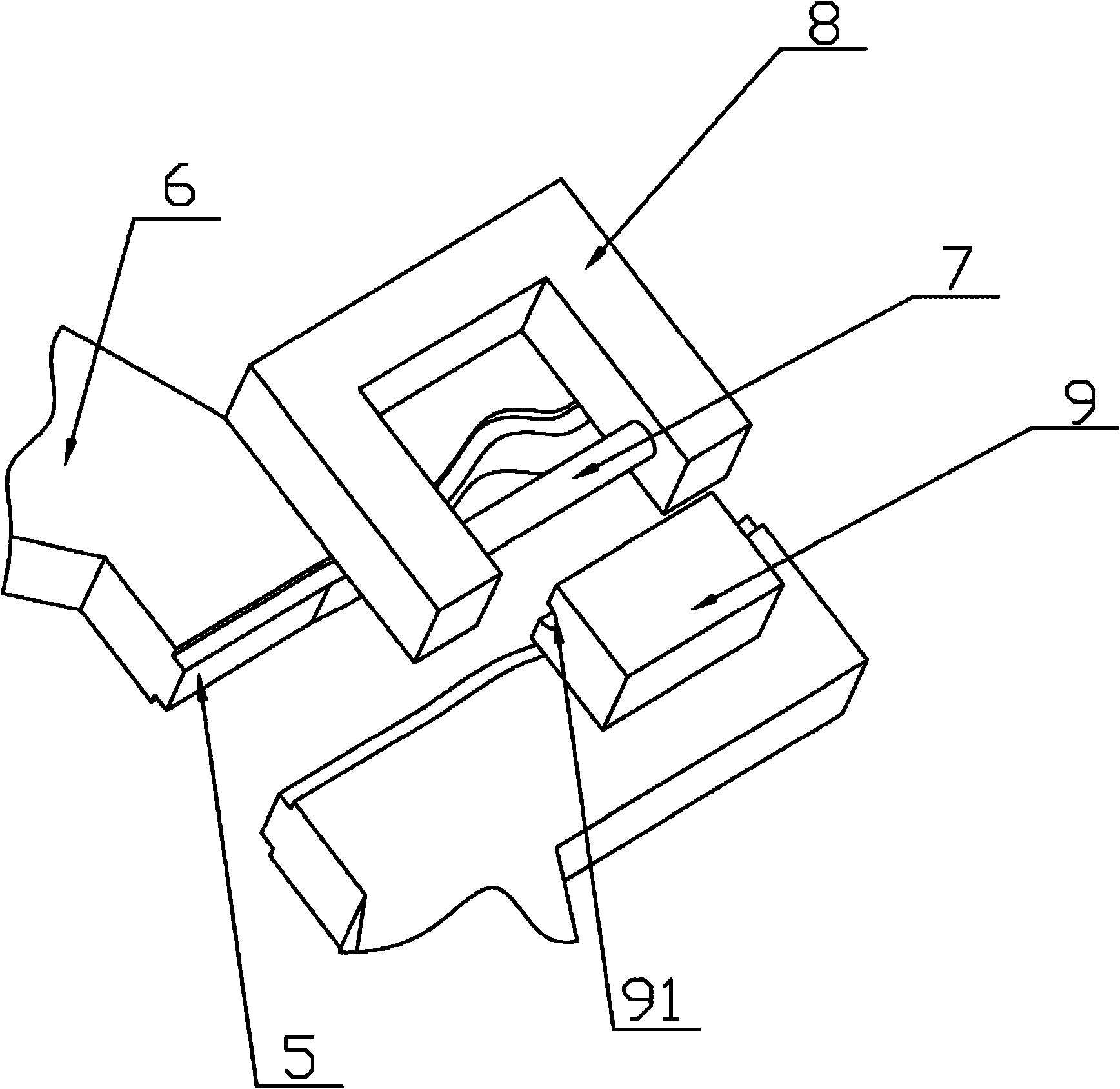
[0032] Such as figure 1 , 2 as shown, figure 1 The fruit harvesting end effector of the embodiment of the present invention includes three parts: a fruit adsorption part, a fruit clamping part and a fruit stalk cutting part. The fruit adsorption part of the air claw is used to absorb the fruit 13 to be picked, and includes the adsorption part 1, the screw rod 2 and the fixed block 3. The fruit clamping part is used for clamping the fruit 13 to be picked, and includes the air claw 4 as the driving part, the clamping gasket 5 and the clamping fingers 6 . The stalk cutting part is used to cut off the stalk of the fruit 13 to be picked, and includes a heating element 7 , a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More