

Control system midpoint positioning method
A control system and point positioning technology, which is applied in the general control system, control/regulation system, adaptive control, etc., to achieve the effect of improving online search efficiency, reducing the demand for data storage space, and shortening the required time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The steps of the two-level grid method of the present invention will be further described below in conjunction with the accompanying drawings. Refer to attached Figure 1-5 , Table 1-2.
[0043] Secondary grid method of the present invention, concrete steps are as follows:
[0044] Step 1. The offline preprocessing process of the two-level grid method, see the flow chart for details Figure 4
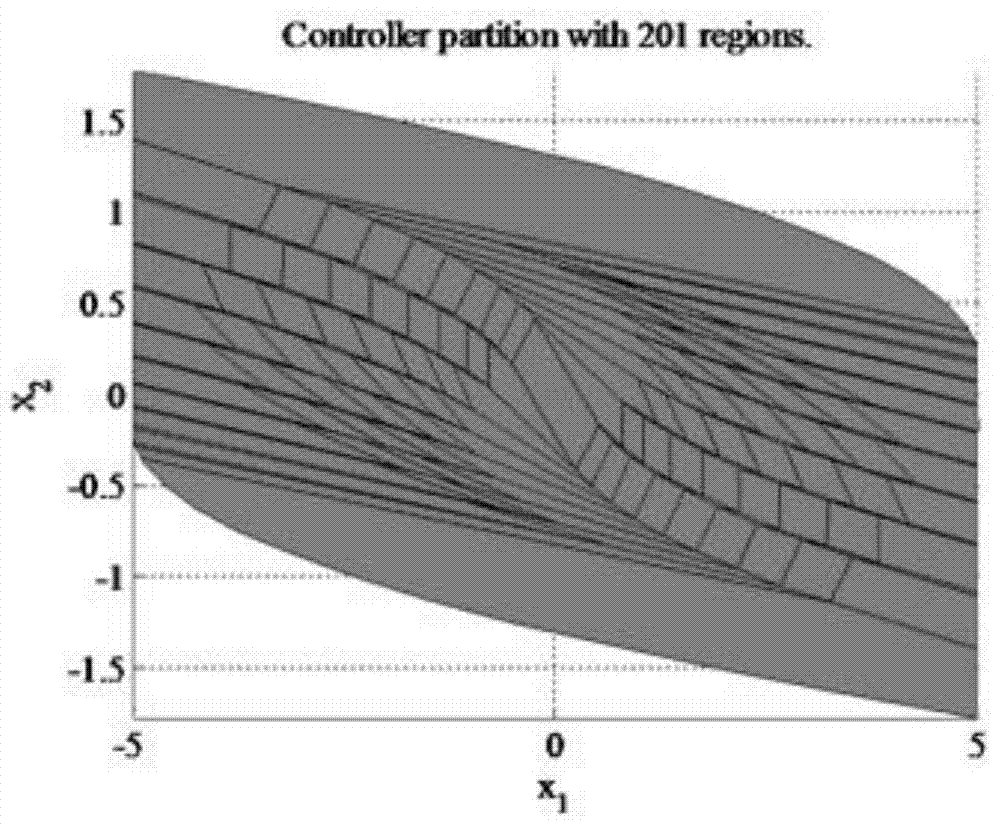
[0045] 1.1. Introduce multi-parameter quadratic programming into the control system, and divide the system state space into convex partitions. The schematic diagram of the state space is as follows Figure 4 shown, and calculate the control rate corresponding to each partition, and save it in the FG array.
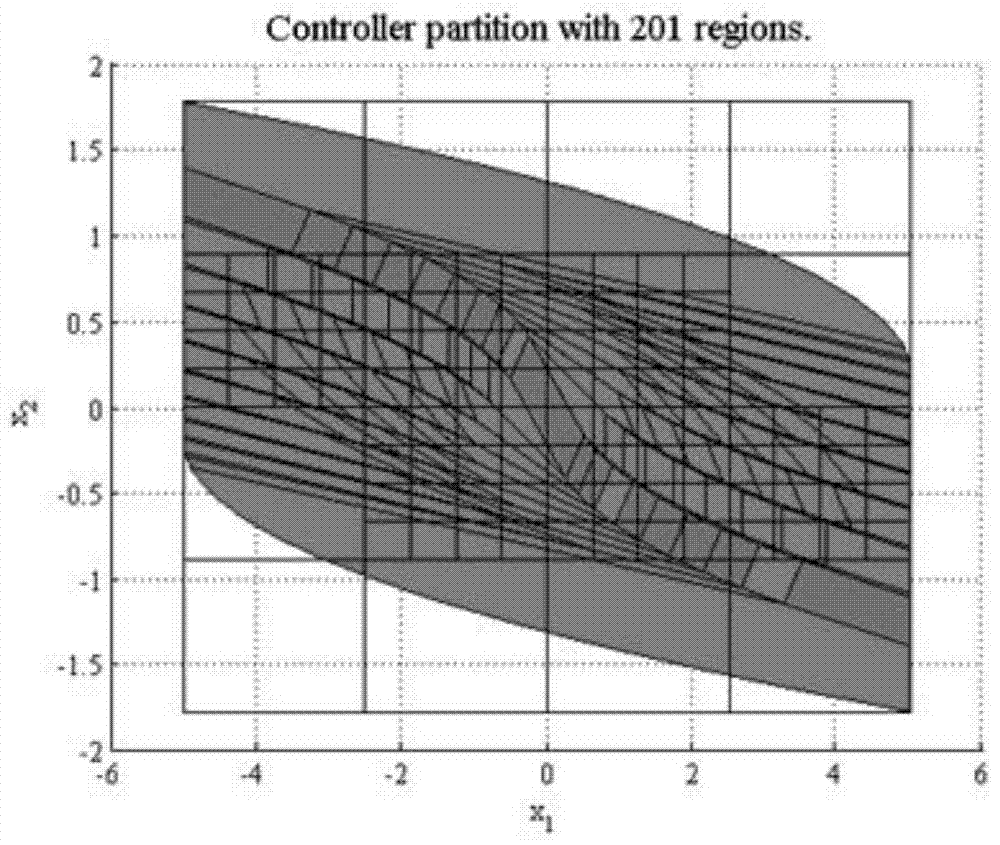
[0046] 1.2, Calculate the synonymous partition. If the eigenvalues of different partitions are the same, the color of the partitions is also the same, such as figure 2 shown.
[0047] 1.3. Construct a first-level hash table grid area polytope.
[0048] 1.4. Perform...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More