

A foot contact detection mechanism suitable for legged robots
A legged robot and detection mechanism technology, applied in motor vehicles, transportation and packaging, etc., can solve the problems of expensive sensors, high requirements for installation and use, and achieve the effect of reducing design difficulty, reducing impact, and simple and applicable structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention will be further described in detail below in conjunction with the accompanying drawings.
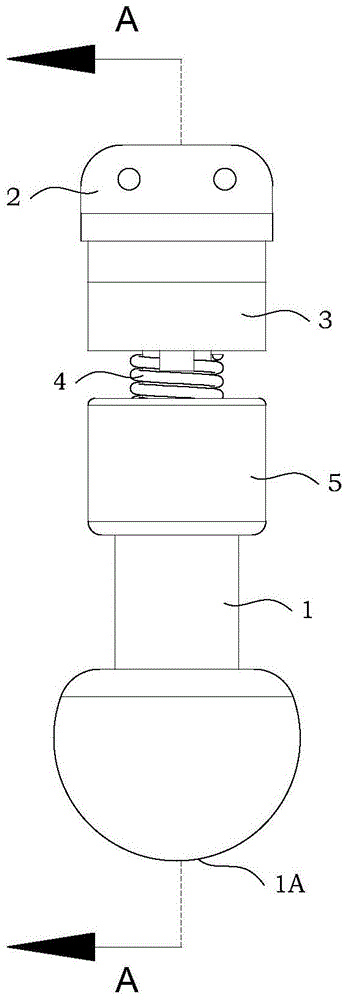
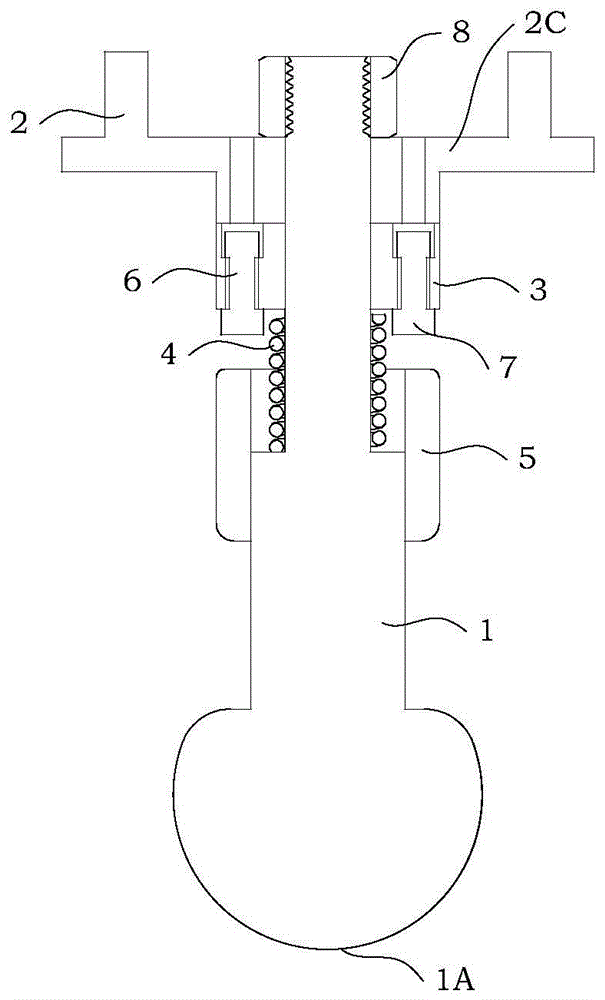
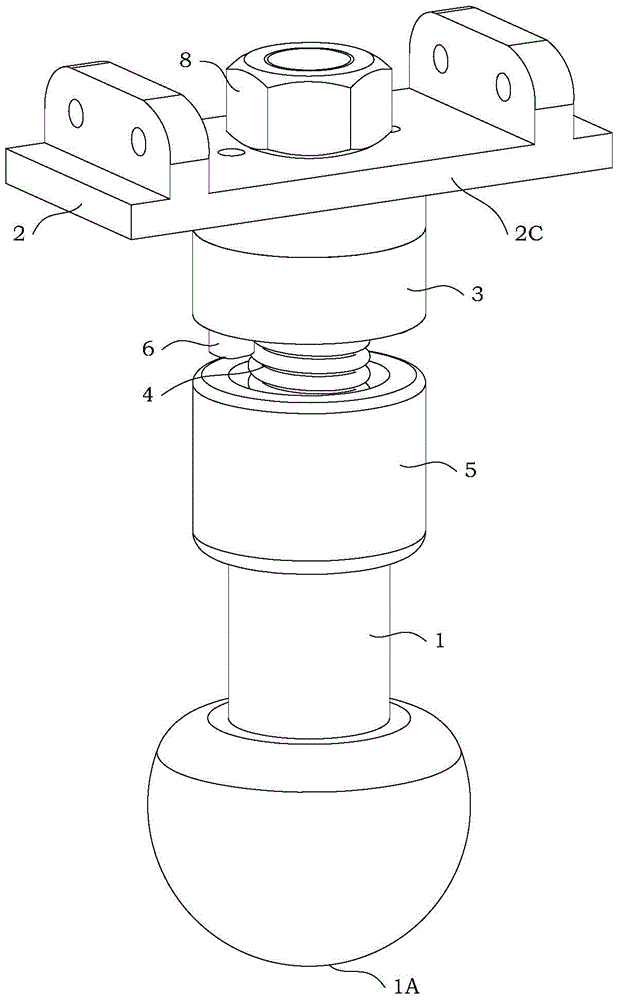
[0038] Generally, a legged robot includes a torso and legs connected to the torso, and at least a foot support 1 is provided on the legs. see figure 1 , Figure 1A , Figure 1B and Figure 1C As shown, the present invention has designed a foot contact detection mechanism suitable for legged robots. The foot contact detection mechanism includes a connecting seat 2, a fixed seat 3, a spring 4, an internally threaded copper column 5, a Copper column 6, B copper column 7 and nut 8;
[0039] The fixed installation of the connection between the foot contact detection mechanism and the legged robot is realized through the A support plate 2A and the B support plate 2B provided on the connection base 2 . That is, after a screw passes through a through hole in the connection part of the legged robot, it is threaded in the AA threaded hole 2A1 of the A support plat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More