

Uncalibrated hand-eye coordination fussy control method based on support vector regression (SVR) learning
A technology of support vector regression and support vector machine, which is applied in adaptive control, general control system, control/regulation system, etc., and can solve the problems of limited number of samples, limited number of samples, and difficulty in guaranteeing the number of infinite samples.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The specific embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
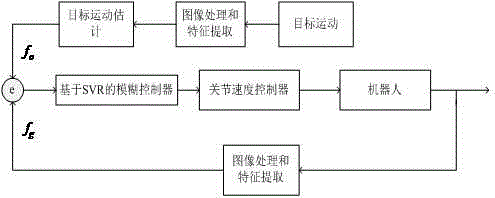
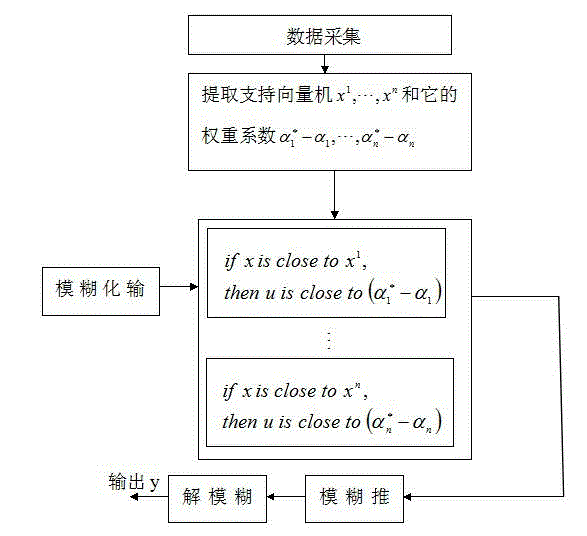
[0029] Such as figure 1 As shown, an uncalibrated fuzzy control method for hand-eye coordination based on support vector regression machine learning, using machine learning algorithm support vector regression machine combined with fuzzy thinking to design a controller, including the following steps:
[0030] 1) The target object and the robot claw movement record and image projection record: the target object moves randomly on the working plane, and the robot claw also moves randomly on the working plane at different speeds, and the target object and the robot are recorded by the camera The movement of the claw, and projected into the image plane; the projected position of the robot claw on the image plane (x g (k),y g (k)) and the projected position of the target object (x o (k),y o (k)) as a significant input;
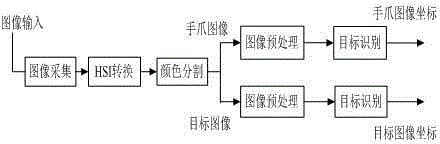
[0031]2) Image process...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More