Predictive control method of knee joint of active upper-knee prosthesis
What is AI technical title?
AI technical title is built by PatSnap AI team. It summarizes the technical point description of the patent document.
A technology of predictive control and knee joints, applied in prosthesis, medical science, etc., can solve the problems of poor real-time performance, low timeliness, unfavorable active prostheses, etc.
Inactive Publication Date: 2016-09-07
HEBEI UNIV OF TECH
View PDF14 Cites 2 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
All the above-mentioned control methods of the existing prosthetic knee joint motion realize the control process of "recognition of gait - giving the set control signal". This kind of control relying on the "set control signal" is an open loop , a system without a feedback mechanism, lacks automatic correction and compensation capabilities
The general closed-loop control algorithm involves online modeling and training problems, has low timeliness, and requires high computing performance of the processor. It relies on sacrificing the operating efficiency of the controller to obtain better control signals, and the real-time performance is poor. And it is not conducive to the battery life of active prosthetic products
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
[0126] The predictive control method of the knee joint of the active knee prosthesis, the steps are as follows:
[0127] The first step is to collect the basic information data of the required experimenters offline and generate a data report:
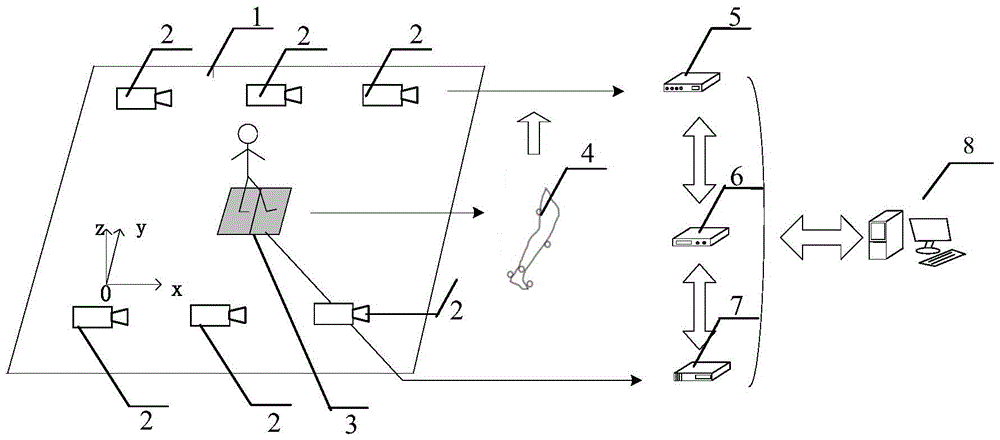
[0128] Using Vicon MX 3D gait analysis system including 6 high-speed MX infrared camera heads, MX components, PC host and MX peripheral kit, the left and right sides of the six lower limbs, namely knee joint, thigh, calf, ankle joint, toe and heel Paste 6 infrared reflective points, according to the infrared reflective points pasted on the above positions, input the basic information of the experimenter's height, weight, leg length, hip width, knee joint width and ankle joint width into the above-mentioned Vicon MX three-dimensional gait analysis In the system, the static model is initialized first, after the above basic information is collected, the missing marker points are filled in and the walking video is simulated in the software ...
Embodiment 2
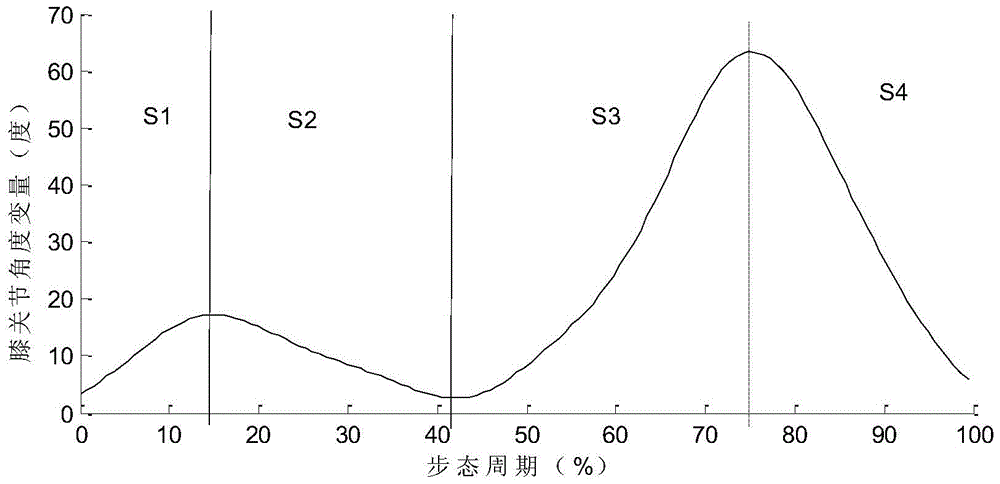
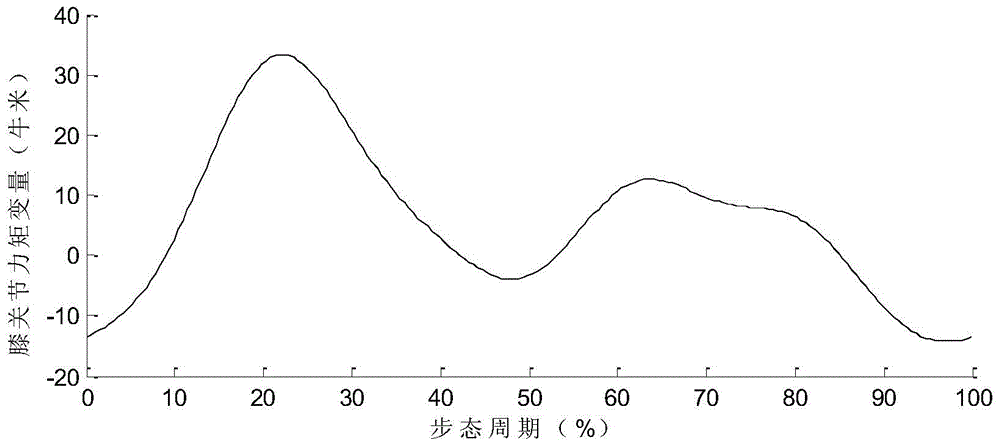
[0154] Except that in the second step of establishing the segmented affine system model of the knee joint motion of the lower limb prosthesis, the two curves are divided into corresponding 27 segments, the others are the same as in the first embodiment.
Embodiment 3
[0156] Except that in the second step of establishing the segmented affine model of the knee joint motion of the lower limb prosthesis, the two curves are divided into corresponding 50 segments, the others are the same as in the first embodiment.
[0157] All the equipment used in the above examples are obtained from known channels.
[0158] The VICON MX three-dimensional gait analysis system described in the above-mentioned embodiment comprises sensor, signal acquisition equipment, data transmission equipment, data processing equipment four parts as follows:
[0159] a. The sensor part includes: a reflective ball 4 with a diameter of 14mm, used to mark the position of the moving point; a force measuring plate 3 with a size of 464×508mm, used for collecting mechanical information.
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention discloses a predictive control method for knee joints of active above-knee prostheses, and relates to control on knee joints. The predictive control method includes steps of collecting required basic information data of experimenters in an offline manner and generating data reports; building modules of piecewise affine systems for knee joint movement of lower limb prostheses; convexly partitioning state regions of the systems according to control performance indexes to obtain control laws; controlling online control procedures of strategies. The predictive control method has the advantages that the models of the piecewise affine systems are built for the lower limb prostheses of human bodies, explicit model predictive controllers are created and can be used for carrying out closed-loop control on the prostheses, information can be exchanged between the controllers and external environments in real time, accordingly, the control precision can be improved, and the safety of products can be guaranteed; model building work and optimization problem solving programming procedures are carried out in offline procedures, only table lookup and simple computation need to be carried out during online control, accordingly, energy consumption of processors can be reduced, and the predictive control method is favorable for improving the endurance of the products.
Description
technical field [0001] The technical solution of the invention relates to the control of the knee joint, in particular to the predictive control method of the active knee prosthesis knee joint. Background technique [0002] Active above-the-knee prosthetics are a type of product that can provide knee joint assistance and track the healthy limb well for amputees above the knee joint. Its control performance not only affects the comfort experience of amputees, but also determines the safety of the product. performance. [0003] CN1088988C discloses a knee prosthesis, which can control the common gait through a microprocessor, and adjust the angle of the knee joint by directly inputting control signals; A simple way to determine the gait and pace through the Hall sensor and directly give the set control signal to control the walking of the prosthesis; CN 201010589305.2 and CN 103750927A both focus on the method of automatically training the expert knowledge base of the lower l...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More