

A hexapod bionic robot
A bionic robot and bionic hip technology, applied in the field of mobile robots, can solve problems such as complex structure, poor bearing capacity, and small driving torque, and achieve high torque, improve work efficiency, and enhance load capacity.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The principles and features of the present invention are described below in conjunction with the accompanying drawings, and the examples given are only used to explain the present invention, and are not intended to limit the scope of the present invention.
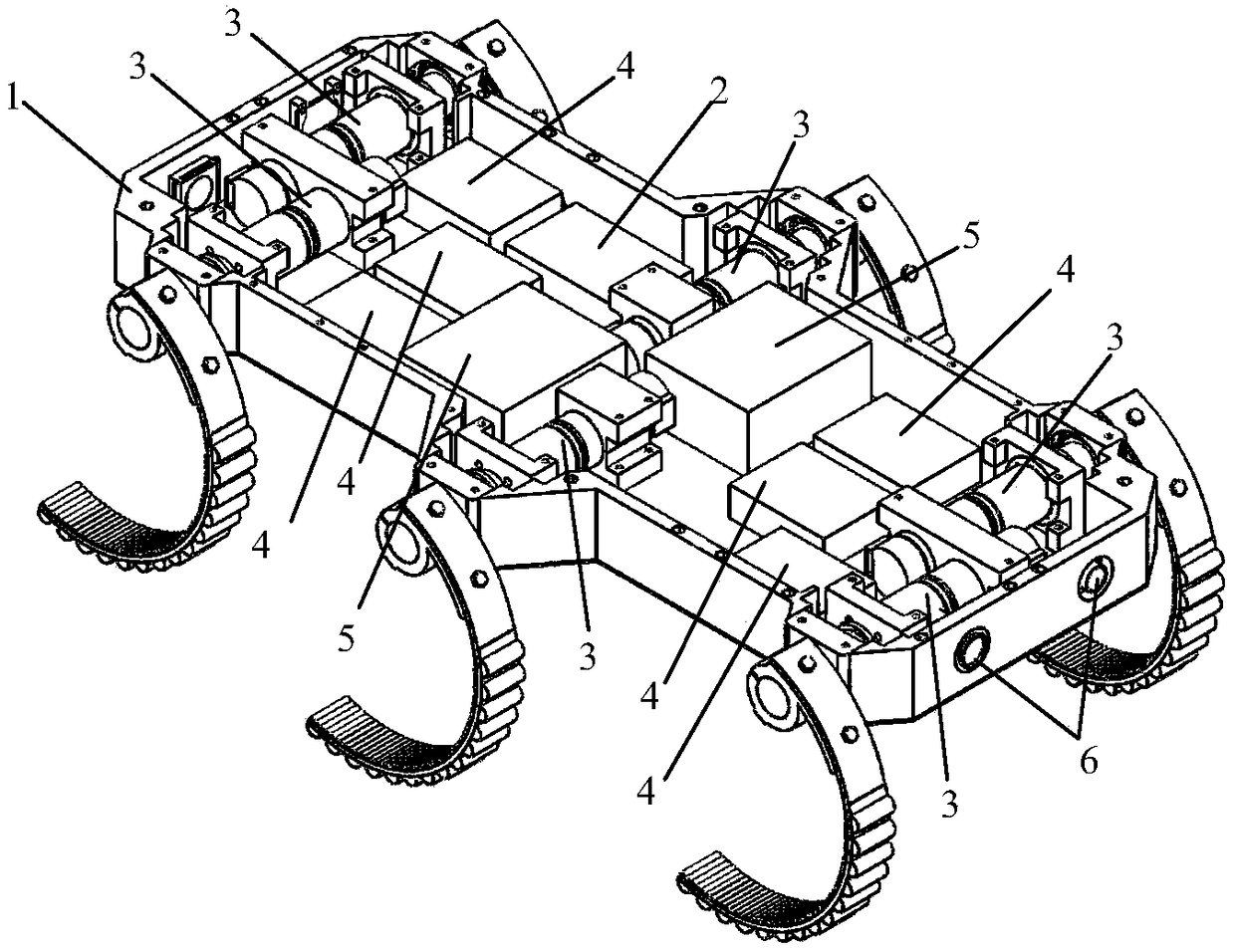
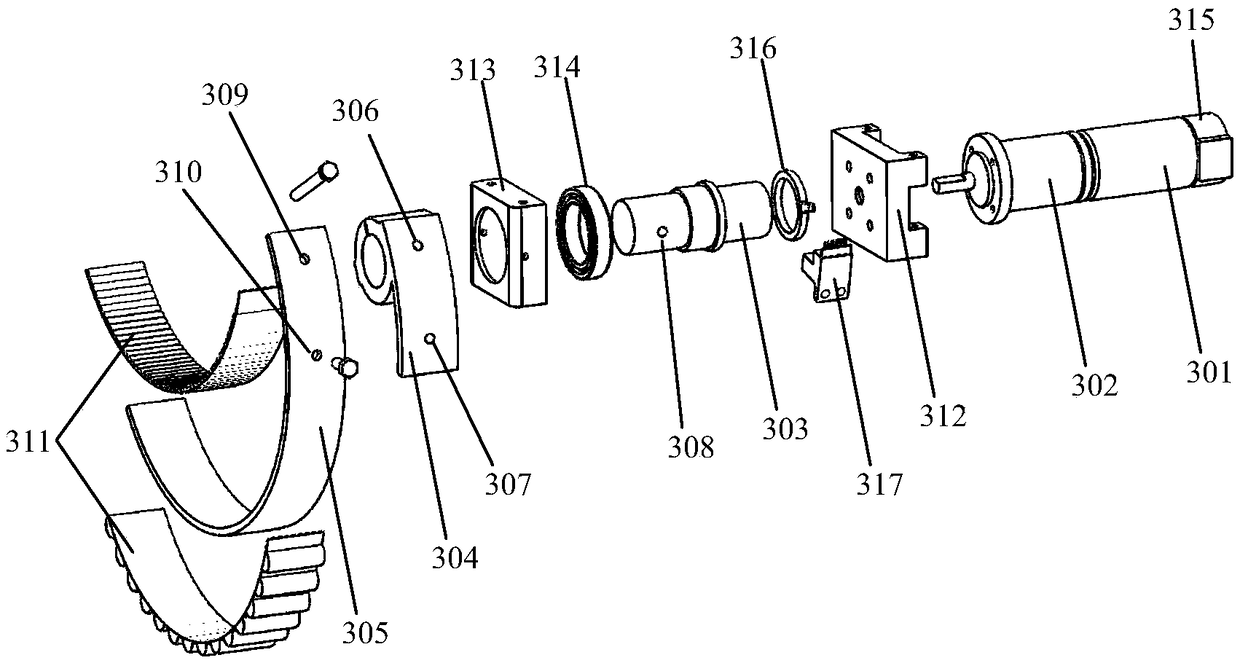
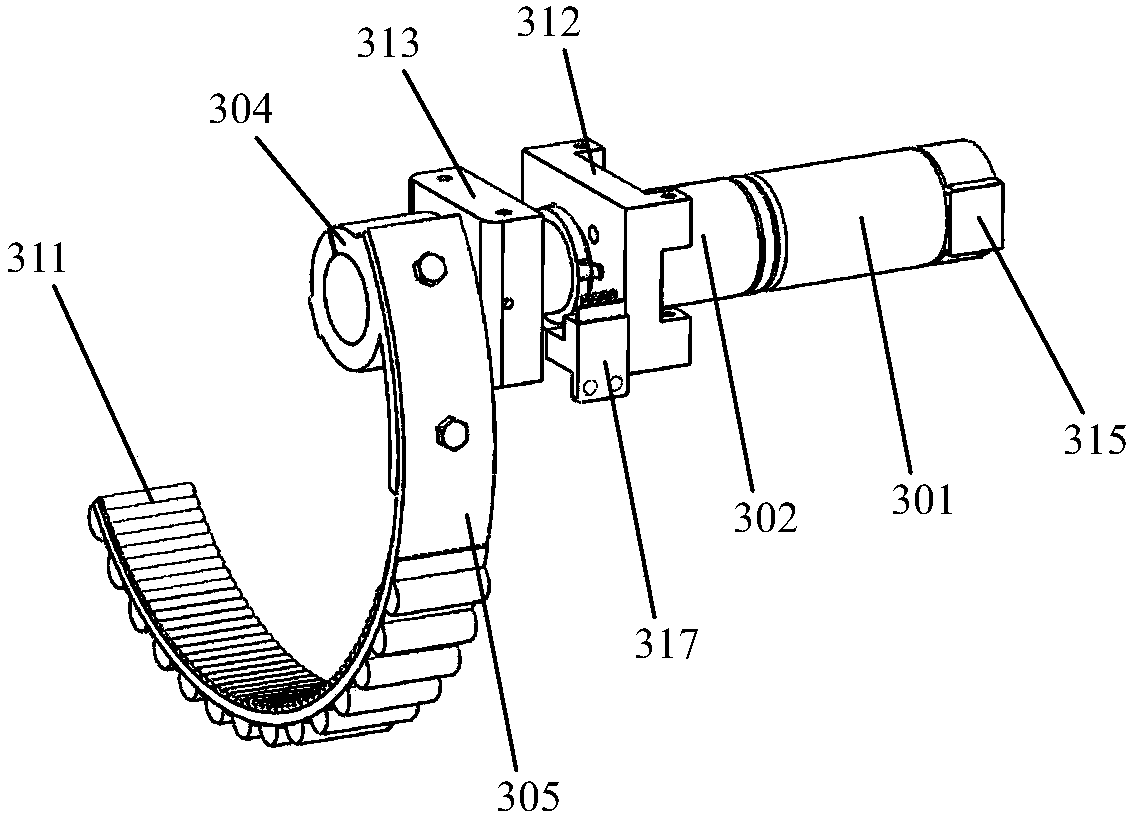
[0030] Such as Figure 1 to Figure 3 as shown, figure 1 It is a schematic diagram of the overall assembly structure of a specific embodiment of a hexapod bionic robot provided by the present invention; figure 2 It is an exploded view of a specific embodiment of the walking device provided by the present invention; image 3 for figure 2 The schematic diagram of the structure of the walking device after assembly is shown.
[0031] In a specific embodiment of a hexapod bionic robot provided by the present invention, it includes a body frame 1, a controller 2 installed in the body frame 1, and a power supply, and also includes six sets of walking devices 3 that drive the robot to walk. The walking device 3 is an i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More