

Registration navigation method based on skeleton three-dimensional point cloud
A navigation method and mid-point technology, applied in surgical navigation systems, medical science, surgical robots, etc., can solve problems affecting registration navigation accuracy, unsatisfactory image quality, and affecting navigation accuracy, so as to improve navigation accuracy and efficiency, The effect of improving navigation accuracy and optimizing navigation accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0078] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
[0079] The registration and navigation method based on the 3D point cloud of the skeleton is different in that it includes the following steps:
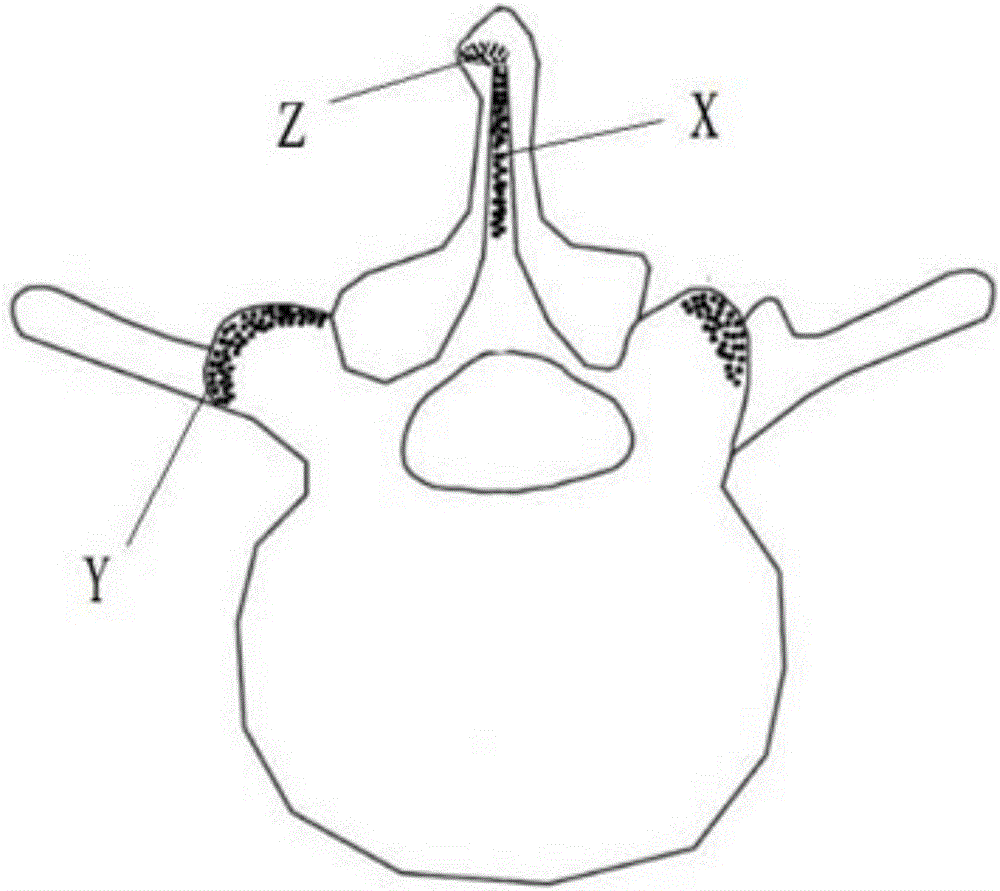
[0080] First, if figure 1 As shown, based on the DICOM data image, the X, Y, Z three-dimensional point cloud virtual coordinate system is formed, and the vertebral contour can be quickly extracted through the DICOM data. Specifically, through the dual-source Flash (SOMATOM Definition Flash) 64-slice spiral CT machine, the bone tissue is scanned, and the two-dimensional image segmentation method is used to extract the outline of the vertebra in the CT image, and the coordinates of the vertebral surface on both sides of the struct...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More