

Quadrotor posture resolving method combining conjugate gradient and extended Kalman filtering
A technique of extending Kalman and conjugate gradient, which is applied in the direction of navigation computing tools, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] Attached below Figure 1-6 The present invention is described in detail with reference to the examples and the present invention is not limited to the given drawings and examples.
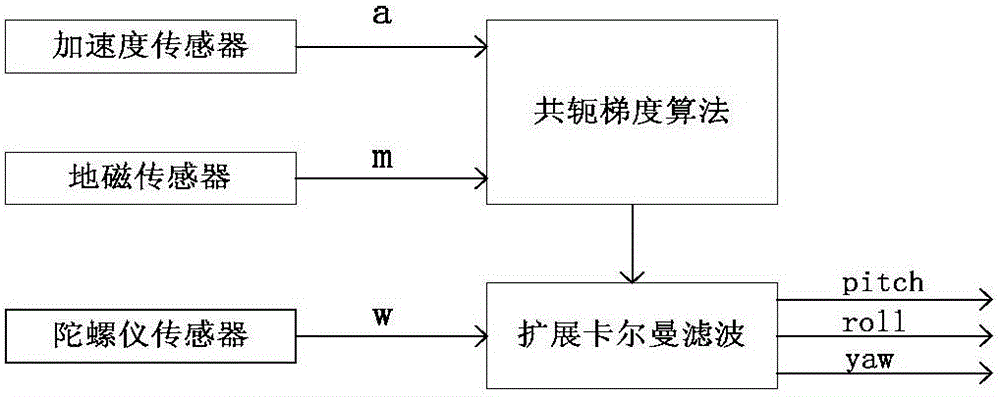
[0044] The overall process of the quadrotor attitude calculation method combined with conjugate gradient and extended Kalman filter implemented according to the present invention is as follows: image 3 and 4 . It is characterized in that comprising the steps of:
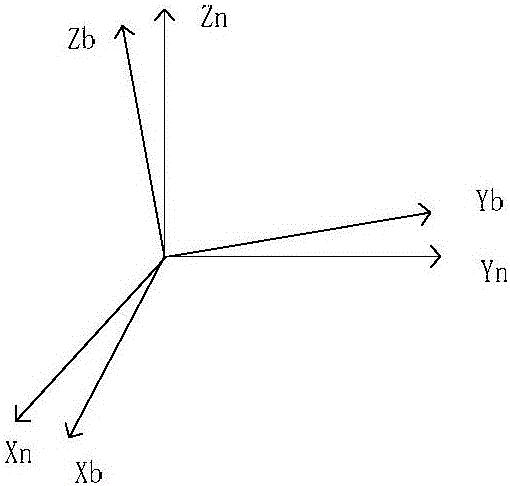
[0045] Step S1: Collect sensor information: In the body coordinate system, collect the state information of the quadrotor through the gyroscope, acceleration sensor, and geomagnetic sensor. Projection, the geomagnetic sensor measures the three-axis magnetic induction intensity at the position of the quadrotor; the body coordinate system is the reference coordinate system fixed to the quadrotor;
[0046] Step S2: Perform de-zero drift processing on the gyroscope and accelerometer respectively:
[0047] Step S3: Use a Butterwor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More