

A 4 DOF forearm of an upper extremity exoskeleton robot
An exoskeleton robot, degree of freedom technology, applied in passive exercise equipment, physical therapy and other directions, can solve the problems of inability to achieve radial flexion and ulnar flexion of the wrist joint, without considering the slight change of arm length, and the patient's inability to use it independently. The effect of avoiding secondary injury, comprehensive upper limb rehabilitation, and increasing safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
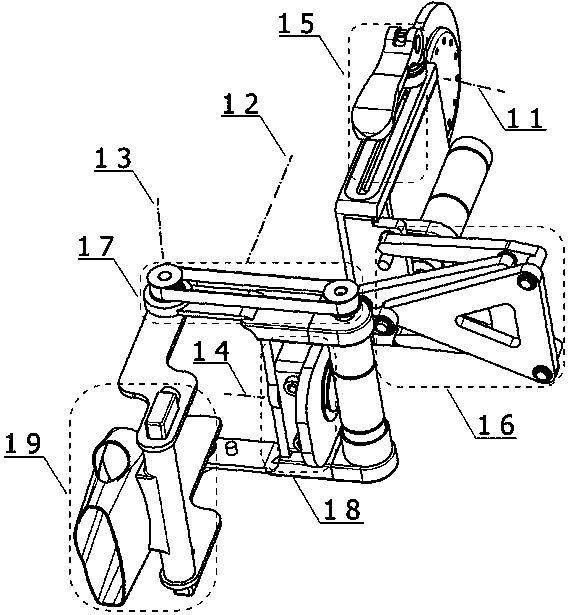
[0035] Such as figure 1 As shown, a 4-degree-of-freedom forearm of an upper limb exoskeleton robot includes a palm cover 71, a forearm base plate 22, an elbow internal and external rotation module 16, a wrist flexion and extension module 17, and a wrist radioulnar flexion module 18;
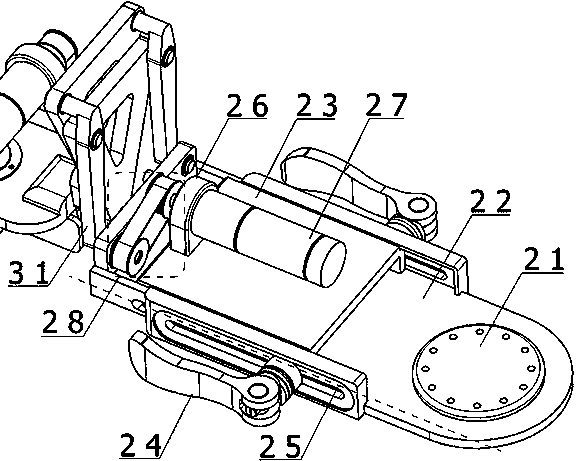
[0036] Such as figure 2 As shown, one end of the forearm substrate 22 is provided with a disk 21; the disk 21 is connected to the upper arm of the upper extremity exoskeleton through bolts; as the first degree of freedom of the forearm, the forearm performs flexion and extension around the elbow rotation axis 11.
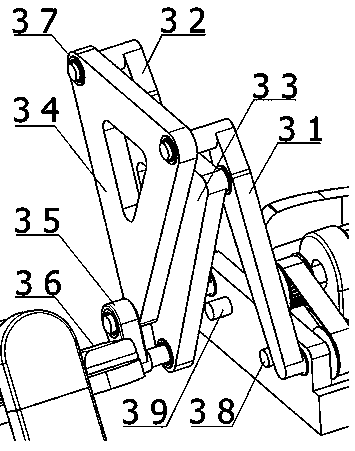
[0037] Such as image 3 , 4 As shown, the elbow internal rotation module 16 includes a power module, a transmission module 28 connected to the power module, and a two-stage parallel four-bar linkage mechanism connected to the transmission module 28; the two-stage parallel four-bar linkage mechanism includes a first connecting rod 31 , the second connecting rod 32, the first isoscel...
Embodiment 2
[0041] It is further optimized on the basis of the 4-DOF forearm of an upper limb exoskeleton robot described in Embodiment 1, and further includes an arm length infinite adjustment module 15, and the arm length infinite adjustment module 15 includes a sliding plate 23 slidingly connected to the forearm base plate 22 and The quick release screw 24 that controls the relative sliding of the sliding plate 23 and the forearm base plate 22 . When adjusting the forearm of the robot to adapt to the length of the arm, open the quick release screw 24, so that the sliding plate 23 slides relative to the forearm base plate 22, and the elbow internal rotation module 16, wrist flexion and extension module 17 and wrist radial ruler fixed on the sliding plate 23 The flexion module 18 moves with the slide plate 23, changing the linear distance between the axis 13 and the axis 11, and realizing the adjustment of the length of the forearm of the robot.
Embodiment 3
[0043] Such as Figure 7 As shown, it is further optimized on the basis of the 4-DOF forearm of an upper limb exoskeleton robot described in Embodiment 1, and further includes an arm length compensation palm cover module 19, and the arm length compensation palm cover module 19 includes a palm cover 71, a first hand 72, the second hand link 73 and the arm length compensation elastic module 74 arranged on the hand link; the palm sleeve 71 is connected with the first hand link 72 and the second hand link 73, and the palm The sleeve 71 includes a cylindrical end 75 which is inserted into an arm length compensating elastic module 74 . The palm cover 7 1 replaces the traditional handle, so that patients with hand weakness can also effectively use the upper limb exoskeleton robot for rehabilitation training. The palm cover conforms to the ergonomic design and makes it more comfortable to wear; Rod 72, second hand connecting rod 73 connect wrist joint and palm, first hand connecting ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More