

Sliding tool
A technology of tools and skateboards, applied in sleds, motor vehicles, transportation and packaging, etc., can solve the problem of single mode
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0096] In order to enable those skilled in the art to better understand the solution of the present invention, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
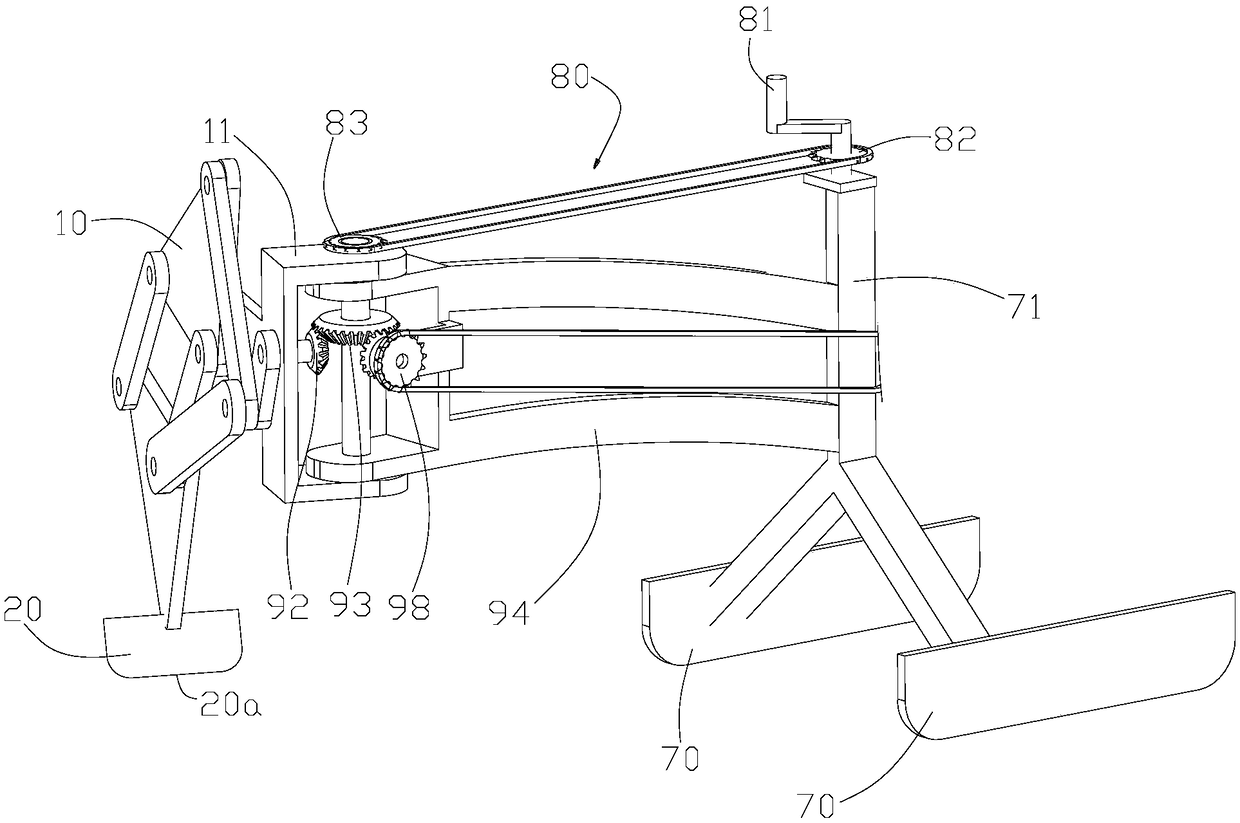
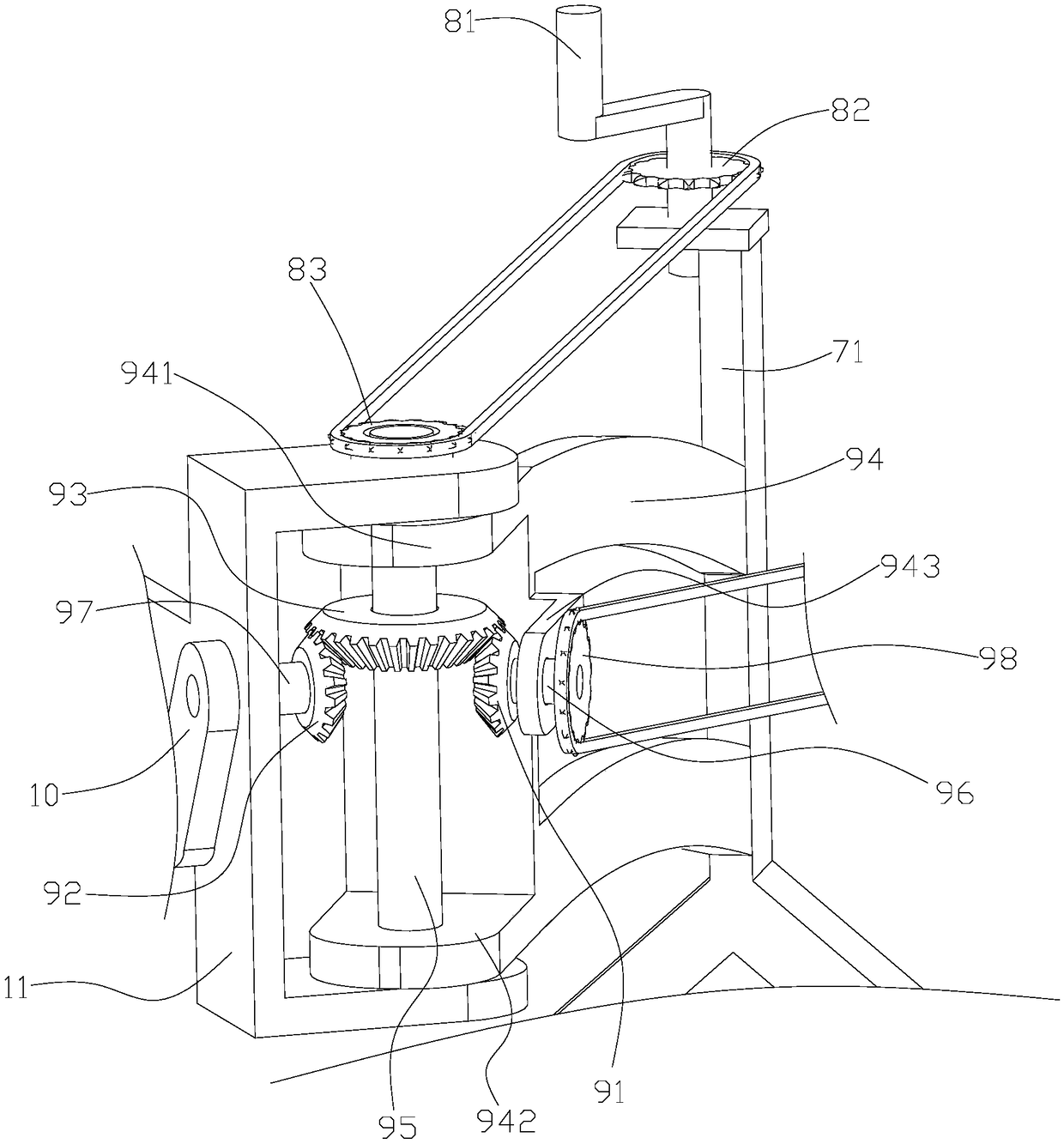
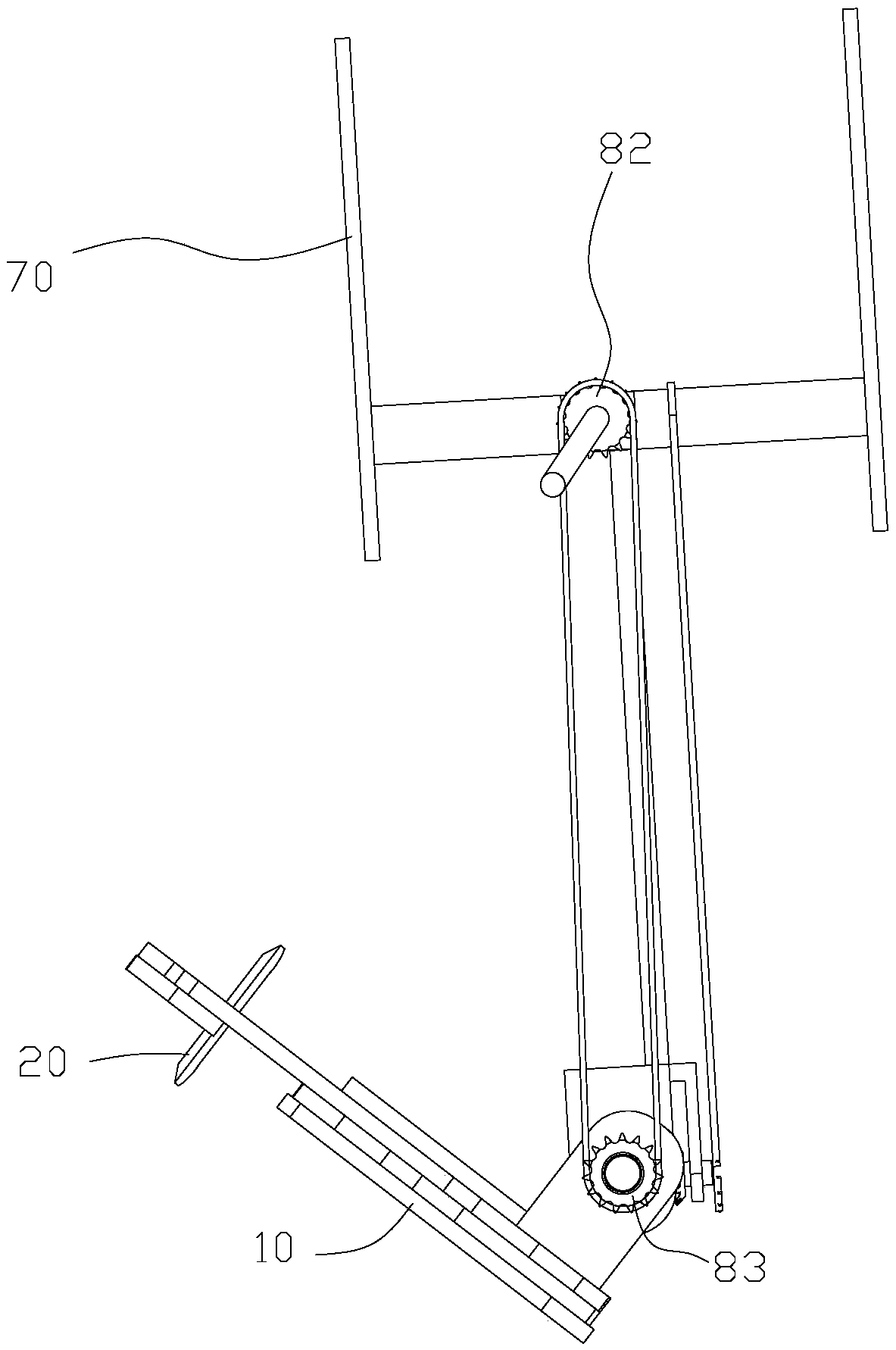
[0097] Please refer to Figure 1 to Figure 3 , figure 1 It is a schematic structural diagram of the first embodiment of the sliding tool provided by the present invention; figure 2 for figure 1 The schematic diagram of the partial structure of the sliding tool shown in another angle; image 3 for figure 1 The schematic diagram of the structure of the sliding tool shown in another angle.
[0098] It should be noted that the inclined setting described herein does not include the situation where the two are perpendicular.
[0099] In this embodiment, the sliding tool includes a main sliding part 70 and a driving device.
[0100] Wherein, the driving device includes a moving mechanism 10 and a driving part 20 connected with the m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More