

Serial robot motion control method and computer storage medium
A technology of robot motion and control method, which is applied in the direction of program control of manipulators, manipulators, manufacturing tools, etc. It can solve the problems of cumbersome solutions and low control efficiency, and achieve the effects of improving real-time performance, reducing burden, and avoiding multiple solutions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
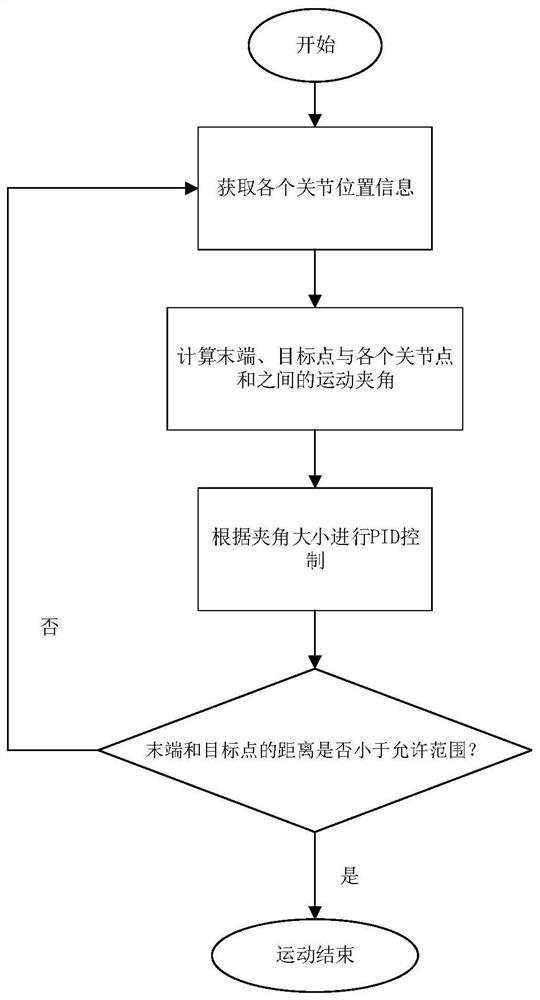
[0038] In this embodiment, the three-degree-of-freedom series robot arm is taken as an example, and the point-position control of the robot is realized through the perception of joint position information. The specific implementation steps of this method are as follows figure 1 shown.
[0039] (1) Establish a global coordinate system:
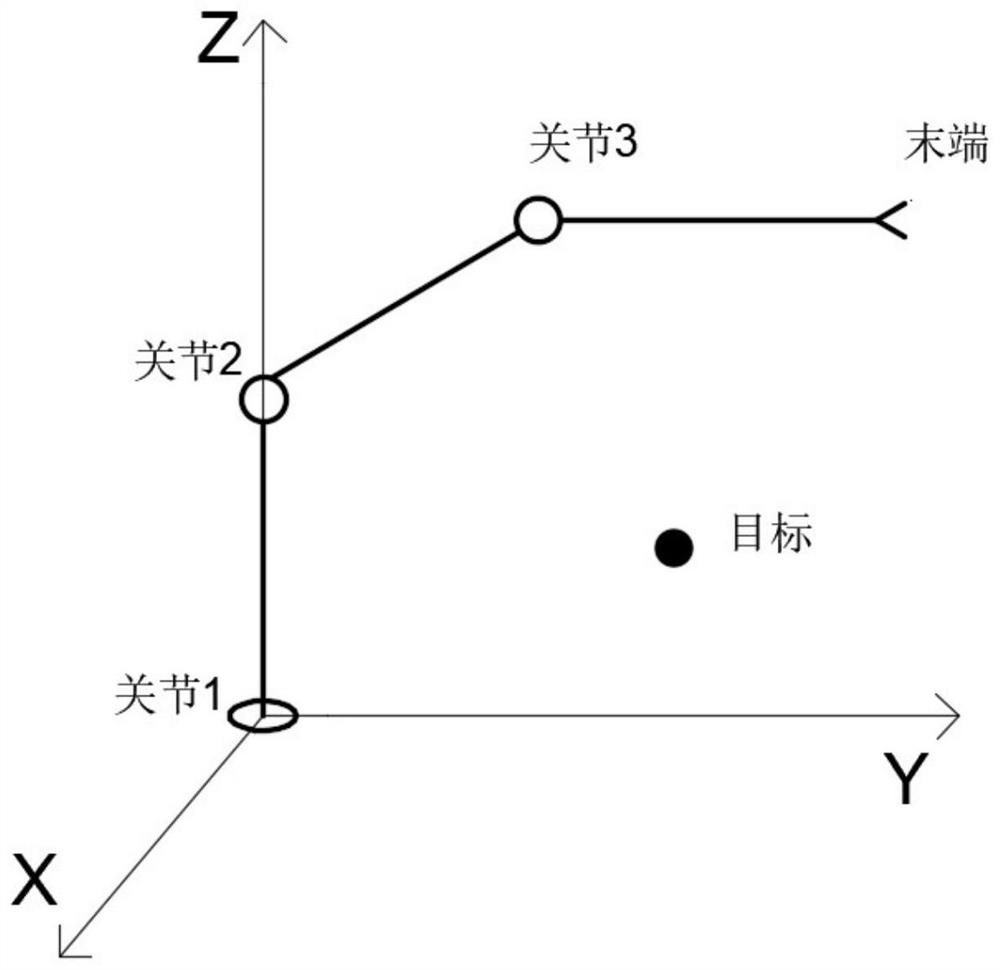
[0040] (1.1) The three-dimensional global coordinate system of the series robot is established starting from the first joint point as the coordinate origin, the Z axis is perpendicular to the robot base upwards, the X axis and the Y axis are determined according to the right-hand rule, and the front view is formed by the Z axis and the Y axis floor plan;
[0041] (1.2) Determine its coordinates in the global coordinate system according to the position information of the target point (x o ,y o ,z o );
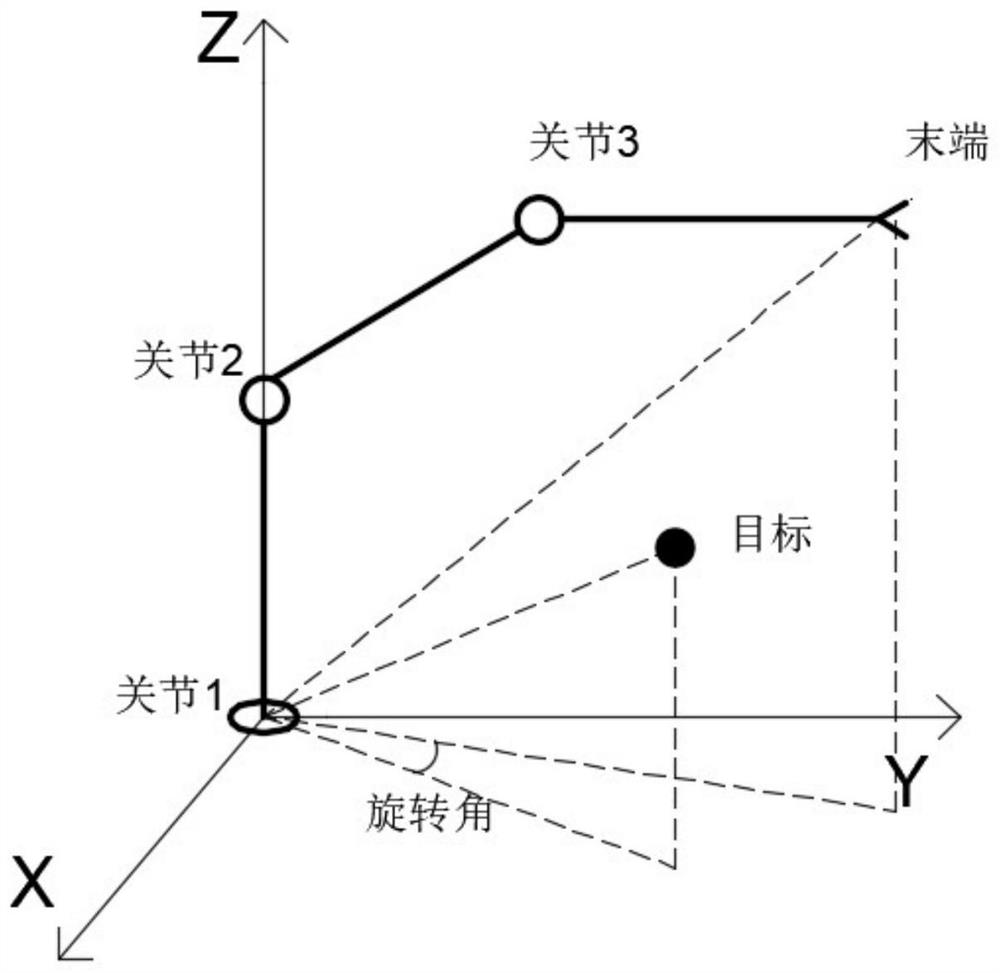
[0042] Such as figure 2 As shown, it is the initial pose graph and the global coordinate system of the established three-degree-of-freedo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More