

A dynamic optimization method for the global path of unmanned ships based on the firefly algorithm
A firefly algorithm and dynamic optimization technology, applied in the field of dynamic optimization of the global path of unmanned ships based on the firefly algorithm, can solve problems such as the complexity of the obstacle avoidance algorithm and the limitation of the planned path, and achieve a simple algorithm, fast response speed, and high efficiency Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
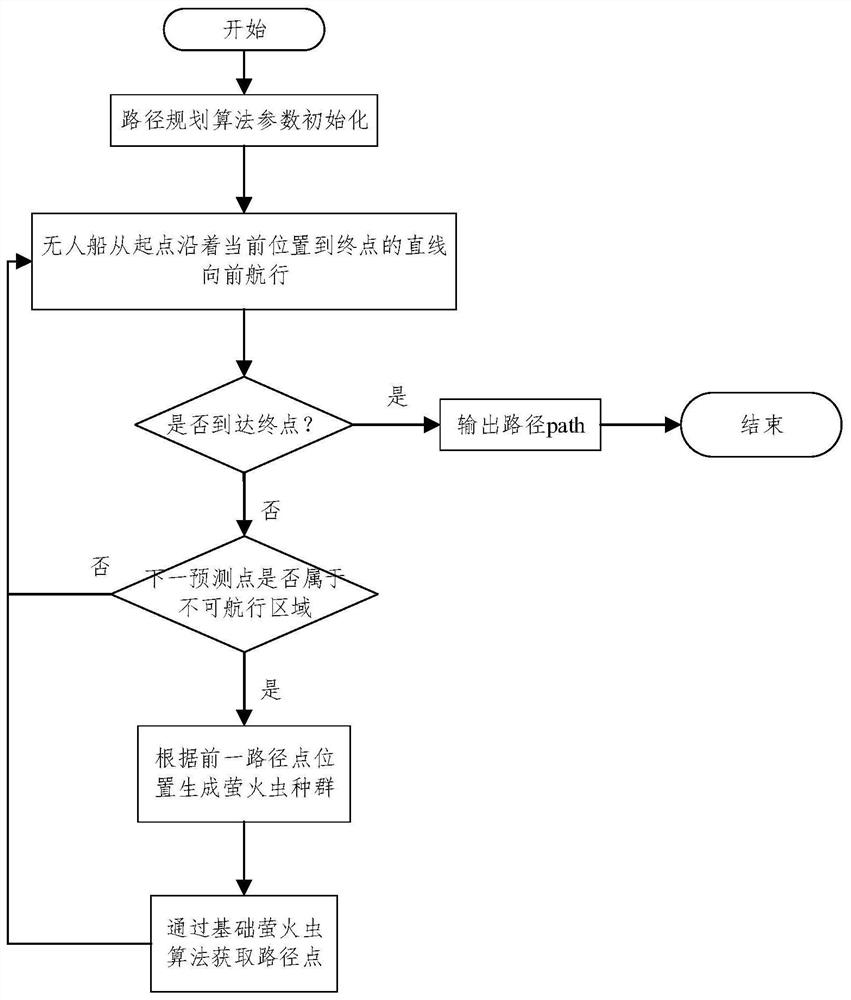
[0043] Such as figure 1 As shown, the present embodiment provides a method for dynamically optimizing the global path of an unmanned ship based on the firefly algorithm, which specifically includes the following steps:
[0044] S1. Obtain the target point P of the unmanned ship navigation mission g (x g ,y g ), and generate the target point P g (x g ,y g ) target area S;
[0045] Wherein, the target area S is, with the target point P g (x g ,y g ) as the center of the circle, with the preset duration t and the current speed V c the circular area whose product is the radius;
[0046] S2. Obtain the current position P o (x o ,y o ) and current speed V c , the current position P o (x o ,y o ) with the target point P g (x g ,y g ) as the sailing direction of the unmanned ship;
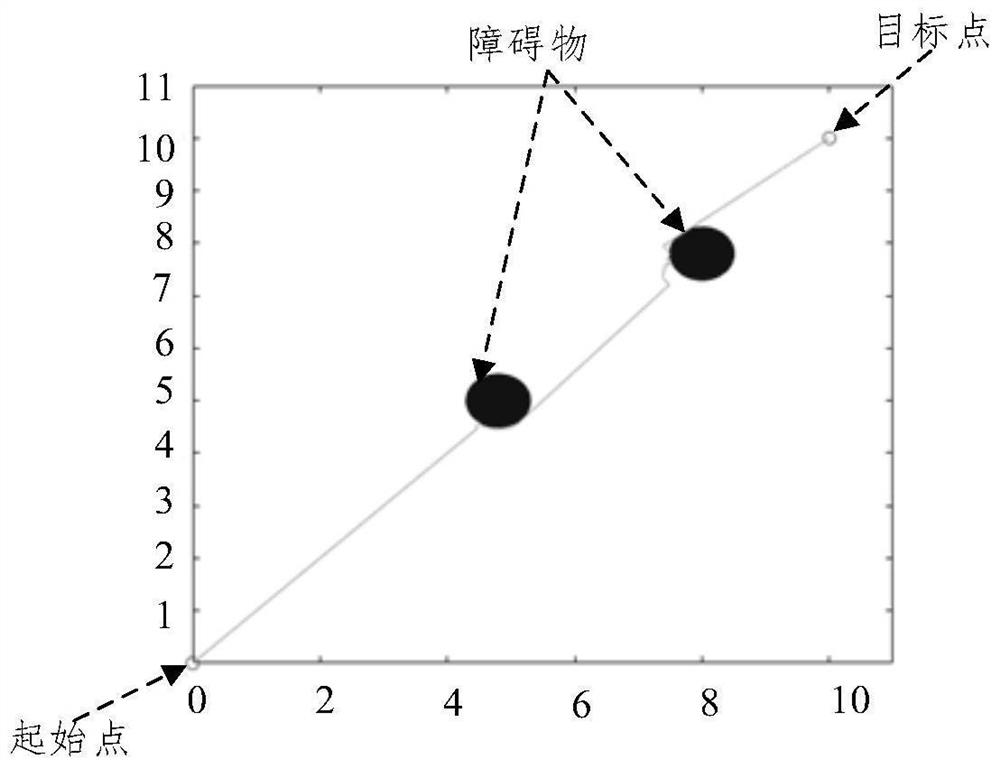
[0047] Assuming that there is no obstacle between the current position and the target point, the initial route is a straight line segment connecting the current position and the target...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More