

Control method and system suitable for obstacle avoiding of car
A control method and technology for obstacles, applied in control devices, vehicle components, transportation and packaging, etc., can solve problems such as inability to effectively solve traffic accidents, and achieve the goal of improving driving safety, avoiding collisions, and avoiding obstacles smoothly. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
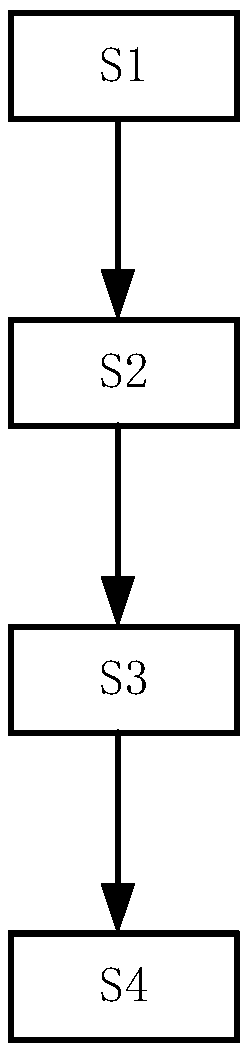
[0030] This embodiment provides an obstacle avoidance control method suitable for automobiles. The driving mode of the automobile includes a manual driving mode and an automatic driving mode. In the manual driving mode, at least the following steps are included:
[0031] S1: Obtain the current speed information of the car based on the sensor module 11, and determine the obstacle information in front of the car based on the obstacle detection module 14;
[0032] S2: The control module 12 detects the driver's manual operation of the steering module 121 and the braking module 122, and the control module 12 generates a first steering control that matches the manual operation based on the driver's manual operation of the steering module and the braking module 122 command and a first brake control command, and generate a first control command according to the first steering control command and the first brake control command;
[0033] S3: The central processing unit 13 generates a s...
Embodiment 2
[0052] This embodiment is a further improvement on Embodiment 1, and repeated content will not be repeated here.
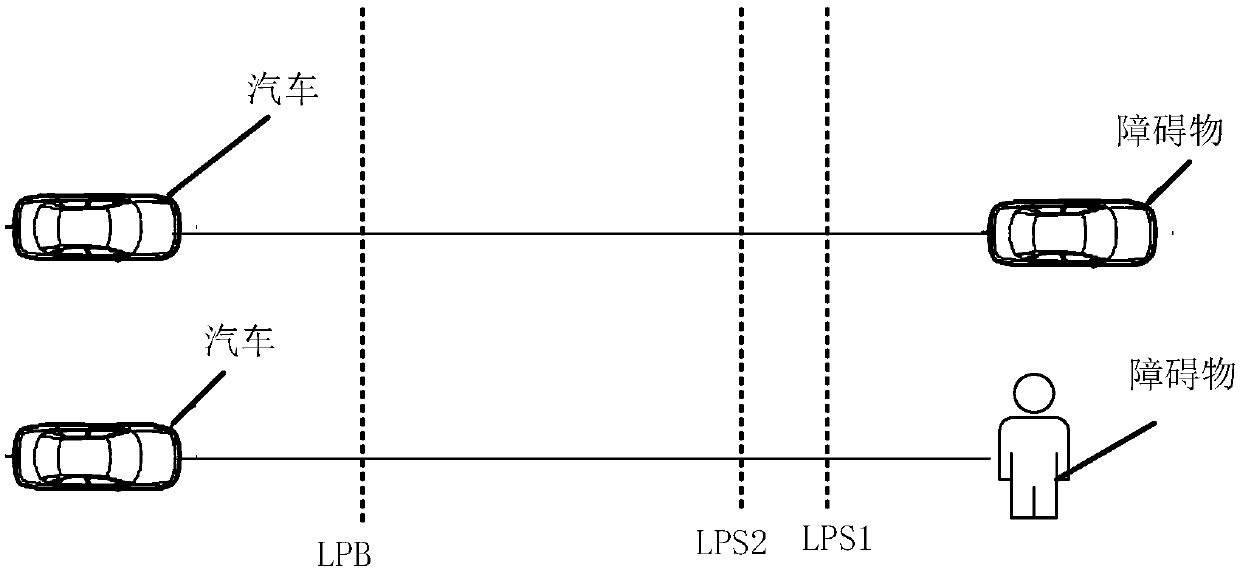
[0053] The control method is under the automatic driving mode: the type of the obstacle in front of the automobile is determined based on the obstacle detection module 14 is a vehicle or a pedestrian; the central processing unit 13 calculates the minimum braking time and the automobile avoidance and obstacle collision avoidance The minimum turning time of object collision; the control module 12 generates a third steering control command and a third braking control command according to the type of obstacle and the minimum turning time, and sequentially controls the braking and steering of the vehicle.
[0054] Preferably, the obstacle detection module 14 can be configured to identify or determine whether the obstacle is a vehicle or a pedestrian. In particular, the obstacle detection module 14 can be configured to detect the width of the obstacle, and when the widt...
Embodiment 3
[0066] This embodiment is a further improvement on Embodiment 1 and Embodiment 2, and repeated content will not be repeated here.
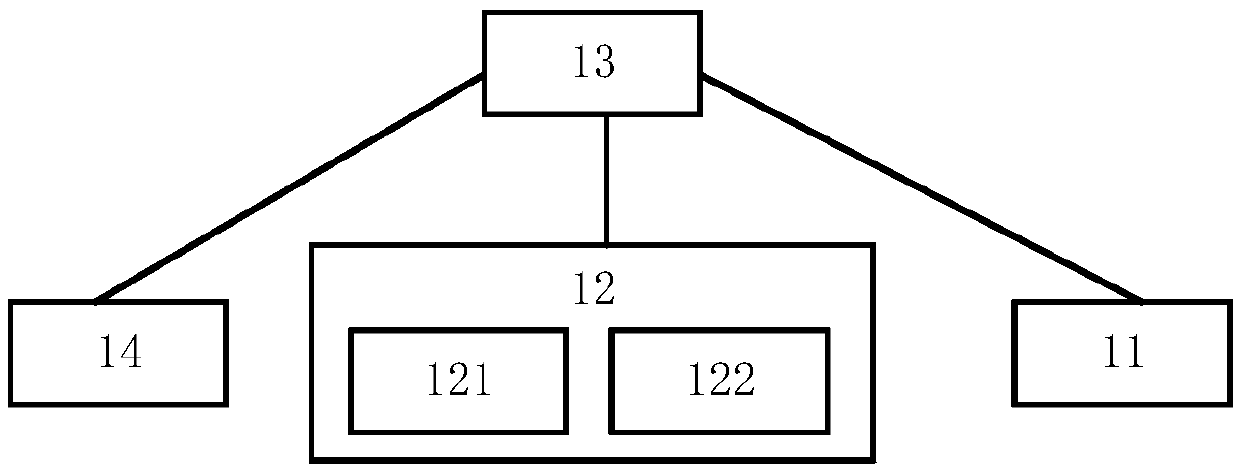
[0067] The present invention also provides an obstacle avoidance control system suitable for automobiles, which at least includes a sensor module 11 , a control module 12 , a central processing unit 13 and an obstacle detection module 14 . The control module 12 includes a steering module 121 and a braking module 122, and the control system is configured to: in the automatic driving mode, obtain the current speed information of the car based on the sensor module 11; determine the obstacle information in front of the car based on the obstacle detection module 14; control The module 12 detects the driver's manual operation of the steering module 121 and the braking module 122, and the control module 12 generates a first steering control instruction and a second steering control command matching the manual operation based on the driver's manual operati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More