

A method and device for planning a full-coverage path of a cleaning robot
A cleaning robot, full coverage technology, applied in the direction of cleaning carpets, cleaning floors, cleaning machinery, etc., to achieve the effect of improving the efficiency of path planning and simplifying the path planning process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 2
[0059] figure 2 A schematic structural diagram of a planning device for a full-coverage path of a cleaning robot provided in an embodiment of the present invention, as shown in figure 2 As shown, the device includes:
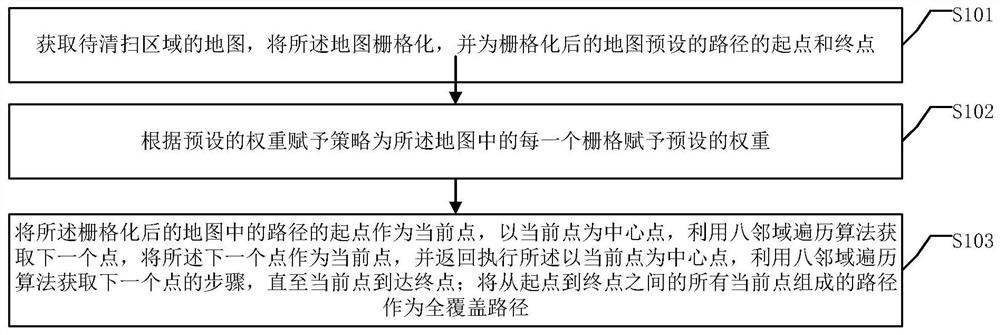
[0060] The obtaining module 501 is used to obtain the map of the area to be cleaned, rasterize the map, and set the starting point and end point of the path preset for the rasterized map;
[0061] The weighting module 502 is configured to assign a preset weight to each grid in the map according to a preset weighting strategy, wherein the weighting strategy includes: decrementing or increasing the weight of the grid row by row, grid The weight of the grid decreases or increases column by column, or the weight ring gradient of the grid decreases or increases;
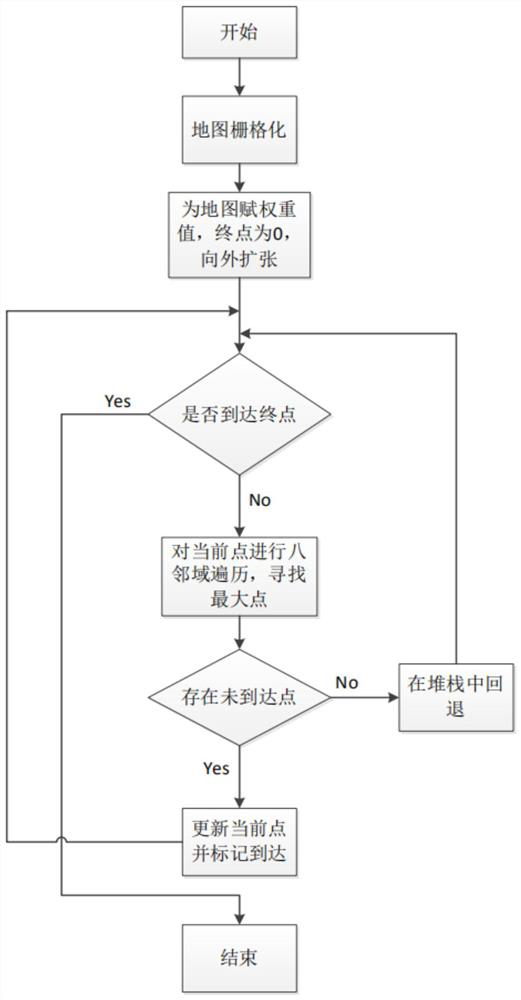
[0062] The path module 503 is configured to use the starting point of the path in the rasterized map as the current point, use the current point as the center point, use the eight-neighborhood traversal...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More