[0003] The purpose of the present invention is to solve the problem of insufficient flexibility of the current robot wrist and self-braking technology, and provides a self-braking pneumatic flexible wrist for robots with the function of maintaining space posture; The driving joint is characterized in that several
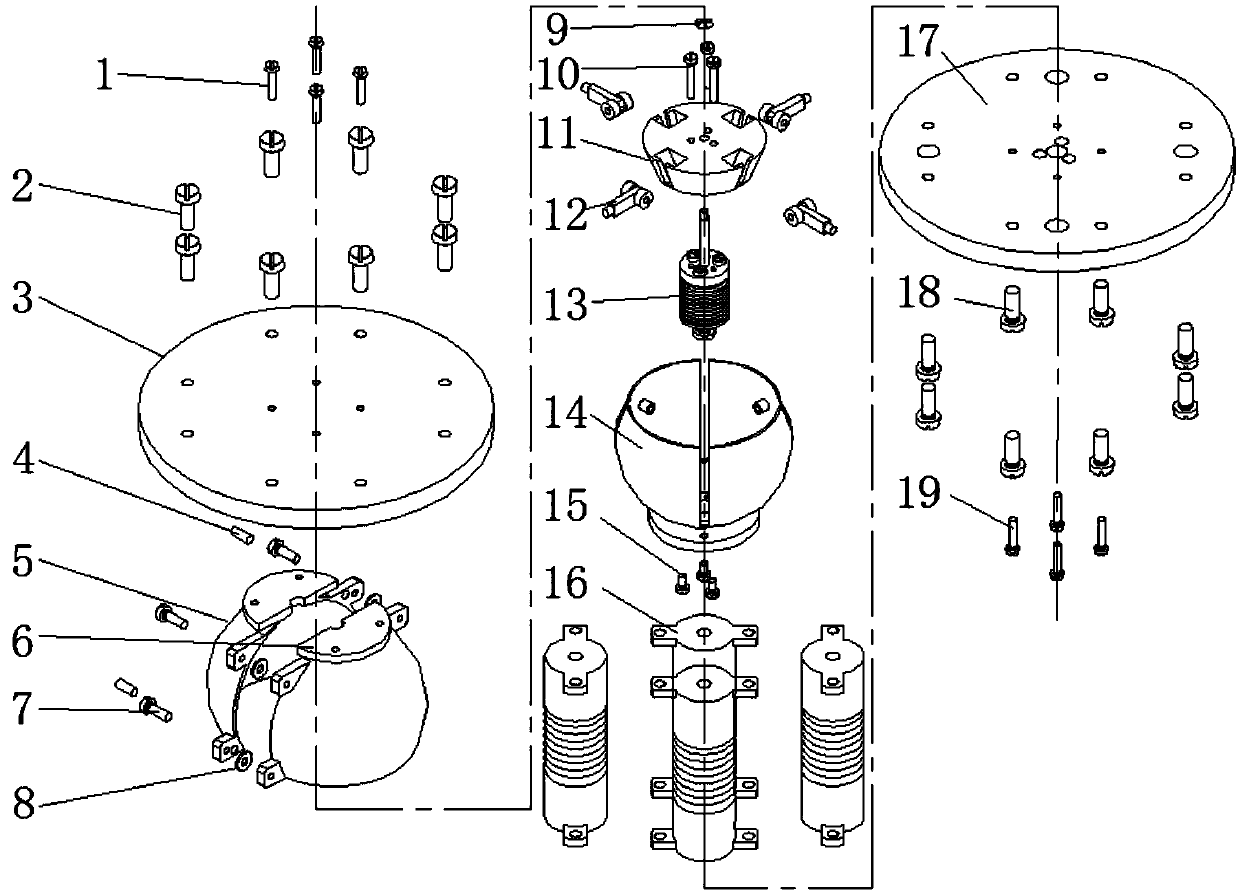
pneumatic artificial muscles are evenly distributed between the upper and lower flanges of the wrist, and an elastic hemispherical braking device is installed in the flexible joint; the axis of the elastic hemispherical braking device is located at the geometric center connecting the upper and lower wrist flanges. thread; the lower
flange of the flexible wrist is provided with threaded connection holes, and four
pneumatic artificial muscles uniformly distributed around the circumference are fixed with bolts; the
pneumatic artificial muscles are composed of elastic airbags and radial restraint elements, which can complete axial drive and deformation, Combined drive of four pneumatic artificial muscles can realize the movement of
two degrees of freedom of the wrist joint
pitch and
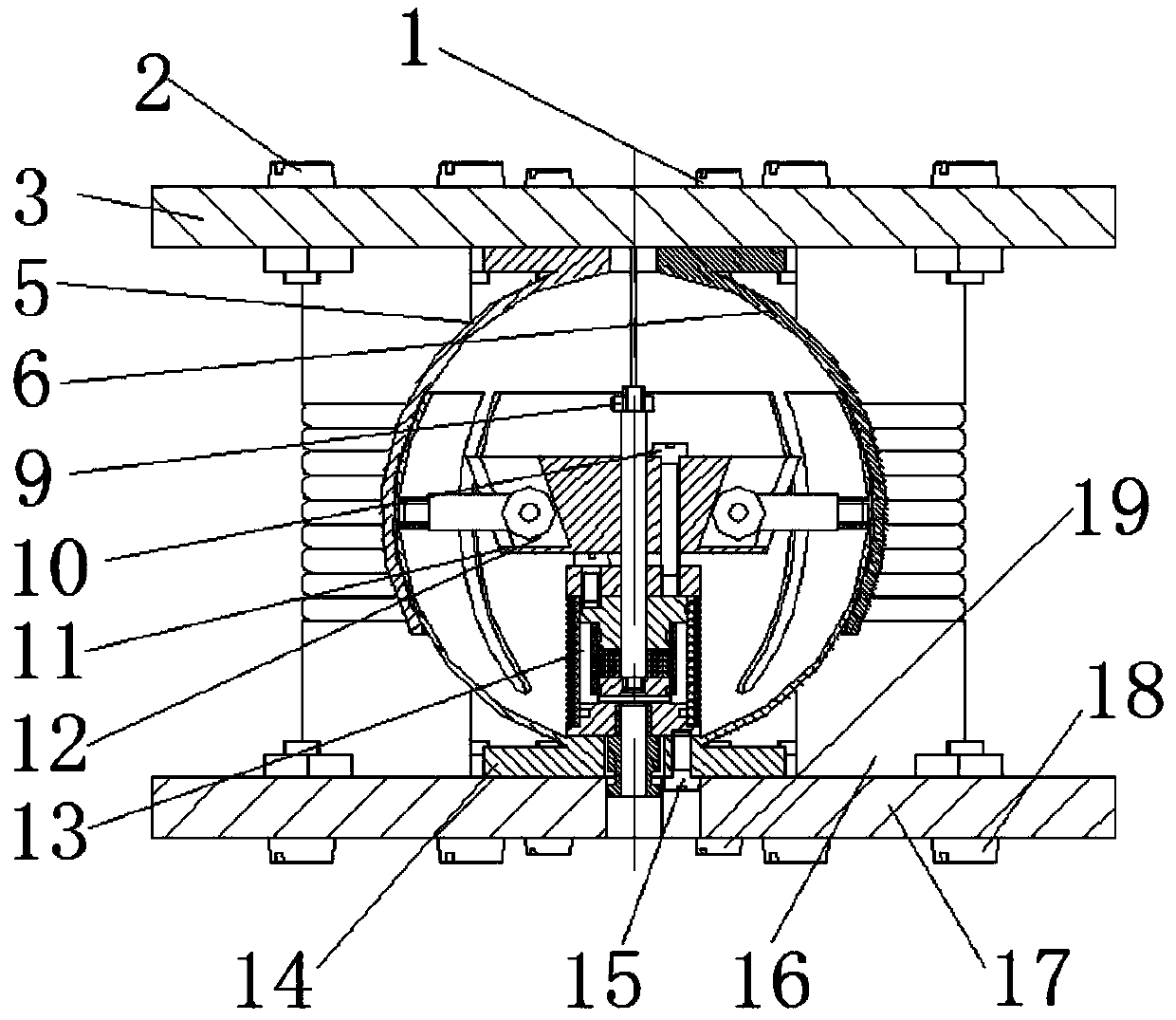
yaw; the elastic hemispherical braking device is composed of adjusting gaskets, fixing bolts, left and right hemispherical seats, inner elastic hemispheres, pneumatic flexible axial Drive, wedge-shaped slider, pull rod, and rollers; there is a threaded hole in the geometric center of the lower
flange of the wrist, and the base of the elastic hemisphere in the elastic hemisphere braking device is fixed with bolts. The inner elastic hemisphere is a
petal-shaped thin-walled hollow hemisphere, and the hemisphere Four grooves are symmetrically distributed on the body to form a
petal-like structure; each elastic
petal of the inner elastic hemisphere is fixedly connected with a pull rod, and the end of the pull rod is equipped with a roller, which is assembled in the T-shaped groove of the inverted tapered wedge-shaped slider. The central axis of the pull rod is perpendicular to the central axis of the wedge-shaped slider; the structural feature of the pneumatic flexible axial driver is that an elastic annular
airbag is provided between the upper and lower end covers of the
actuator, and a guide shaft is provided at the central axis of the annular
airbag; the elastic annular
airbag is fed with gas After that, it can be extended axially along the guide shaft; the elongation and driving force depend on the pressure of the gas fed into the annular air bag; the lower end cover of the pneumatic flexible axial driver is fixed to the bottom of the inner elastic hemisphere cavity, and the pneumatic flexible shaft is guaranteed The central axis of the axial driver coincides with the central axis of the joint; the upper end cover of the pneumatic flexible axial driver is fixedly connected with the inverted tapered wedge-shaped slider; there are four T-shaped slideways evenly distributed on the tapered surface of the wedge-shaped slider, and the centerline of the T-shaped slideway is in line with the The central axis of the wedge-shaped slider forms a certain angle; the inner elastic hemisphere is equipped with a ball seat, and the ball seat is composed of left and
right hemisphere seats; the left and
right hemisphere seats are provided with adjusting gaskets and fixing bolts; the ball seat and the inner elastic hemisphere For
interference fit, a pre-tightening force is generated between the ball seat and the inner elastic hemisphere, and the pre-tightening force is the initial braking force of the wrist joint; the size of the pre-tightening force can be adjusted by adjusting the thickness of the
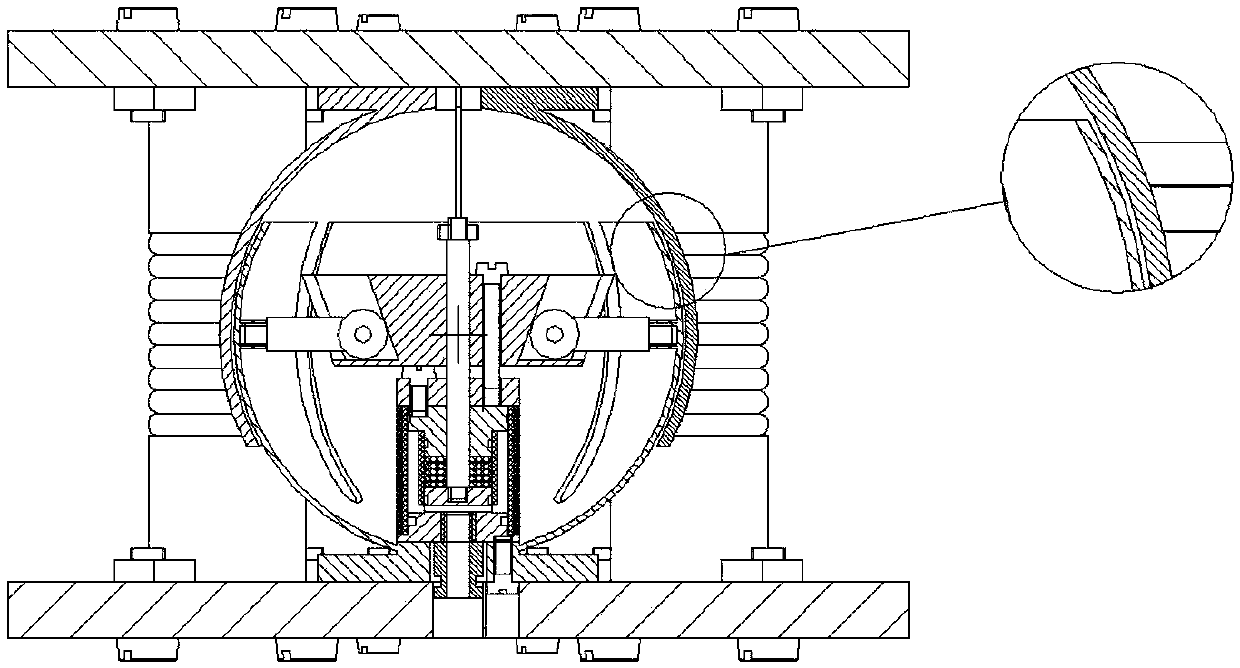
gasket on the ball seat; There is a gas inlet at the lower end of the pneumatic flexible axial driver. When the charged air pressure increases, the pneumatic flexible axial driver is driven to elongate and deform in the axial direction; when the pneumatic flexible axial driver is elongated and deformed, the wedge-shaped slider is pushed to move axially along the guide shaft , so that the roller in the T-shaped slideway of the wedge-shaped slider drives the pull rod to move radially; at this time, the inner elastic hemispherical petal-shaped
brake plate shrinks radially, and the
friction force between the inner elastic ball and the ball seat is reduced or reduced to zero; The pre-tightening force between the ball seat and the inner elastic hemisphere decreases, and the braking force decreases; when the axial extension of the pneumatic flexible axial driver reaches a certain value, the ball seat and the inner elastic hemisphere are separated from each other, and the braking force is zero. When the elastic spherical braking device is in working condition, the wrist can move flexibly; when the wrist action is completed, the input pressure of the pneumatic flexible axial driver is reduced to zero, and the pneumatic flexible axial driver drives the wedge-shaped slider to return to the initial position along the guide shaft; The petal-shaped
brake plate of the inner elastic hemisphere is radially reset under the action of its own elasticity, so that the initial braking force between the ball seat and the inner elastic hemisphere can be restored, so as to keep the posture and posture of the wrist stable and bear a certain load; the flexible wrist works During the process, the braking force can also be adjusted according to the needs, and the braking force depends on the input pressure of the axial driver; the advantages of the present invention are small size, flexible joints, position and posture maintenance function, and the braking force can be flexibly adjusted; the braking device As a part of the flexible wrist joint, it can increase the stiffness of the flexible wrist and improve the
bearing capacity; make the wrist more adaptable and more stable when it touches different loads; it has great promotion and application value in the application fields of bionic robots and special equipment. , with good prospects for development



 Login to View More
Login to View More  Login to View More
Login to View More