

A method and system for predicting the danger level of pedestrians around a vehicle
A technology of hazard level and prediction method, which is applied in the direction of road vehicle traffic control system, prediction, collision avoidance system, etc., can solve the problems of limited applicable scenarios, poor predictability, and strong subjectivity, so as to avoid uncertainty and shorten the The effect of forecasting time and reducing computing costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0042] This embodiment discloses the preferred embodiments of the present invention are described in detail below in conjunction with the accompanying drawings, wherein, the accompanying drawings constitute a part of the application and together with the embodiments of the present invention are used to explain the principles of the present invention and are not intended to limit the scope of the present invention scope.
[0043] Example 1
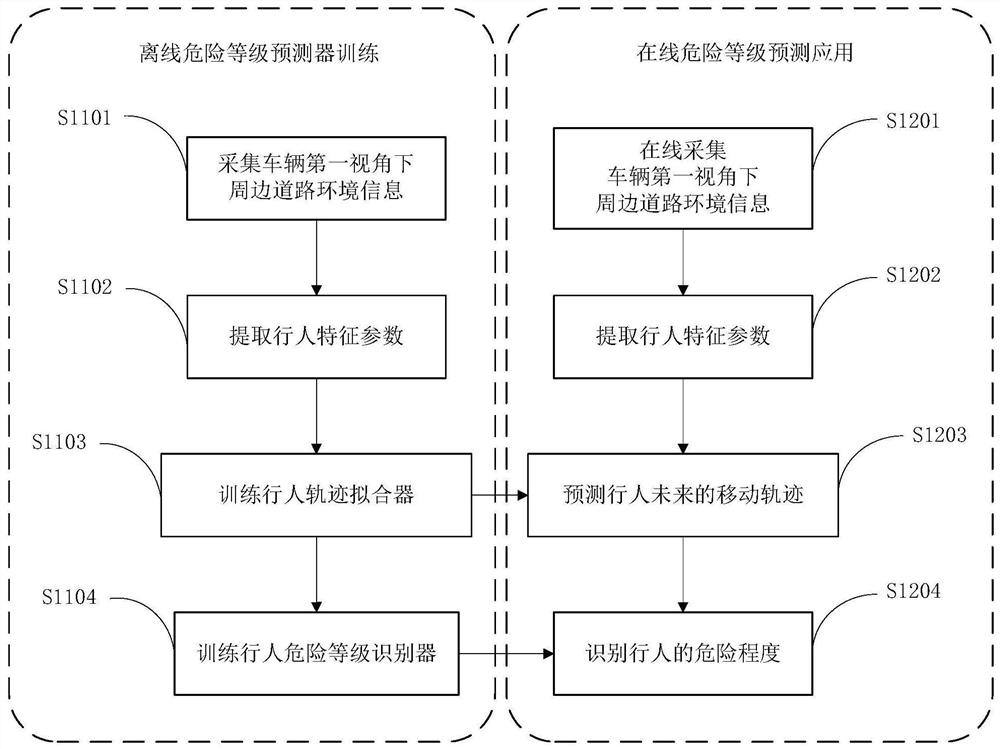
[0044] like figure 1 As shown, this embodiment provides a method for predicting the danger level of pedestrians around the vehicle, including two parts: offline danger level predictor training and online danger level prediction. like figure 1 It is a schematic flow chart of the method described in this embodiment.
[0045] Among them, the offline danger level predictor training includes the following steps:
[0046] Step S1101, using the on-board sensor to collect the surrounding environment information from the first perspective of the...
Embodiment 2
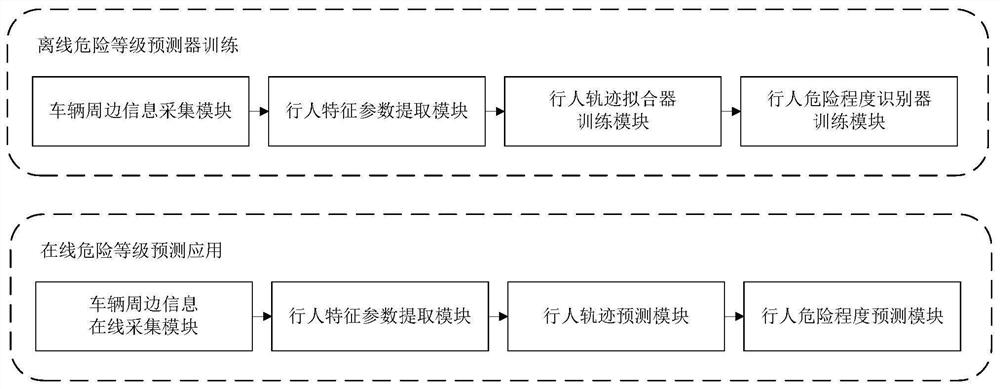
[0068] like figure 2 As shown, this embodiment provides a system for predicting the danger level of pedestrians around the vehicle, which includes an offline danger level predictor training part and an online danger level prediction part.
[0069] Among them, the offline training part includes the online collection module of vehicle peripheral information, the pedestrian characteristic parameter extraction module, the pedestrian trajectory fitting training module, and the pedestrian danger level recognition training module.
[0070] The vehicle surrounding information collection module is used to collect the surrounding environment information from the first perspective of the vehicle.
[0071] Specifically, through an image acquisition device, such as an on-board camera installed at the front windshield of the vehicle, image information around the vehicle is collected; through a lidar installed on the top of the vehicle, 3D point cloud information around the vehicle is colle...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More