

Multi-section combined type and wingspan folding type underwater robot and motion mode thereof
An underwater robot and combined technology, which is applied in the direction of motor vehicles, underwater ships, underwater operation equipment, etc., can solve the problems of high rigidity, non-foldable, slow body posture and speed, etc., and achieve high mobility and easy installation , the effect of precise and flexible movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] Below in conjunction with accompanying drawing and specific implementation case the present invention is described in further detail:
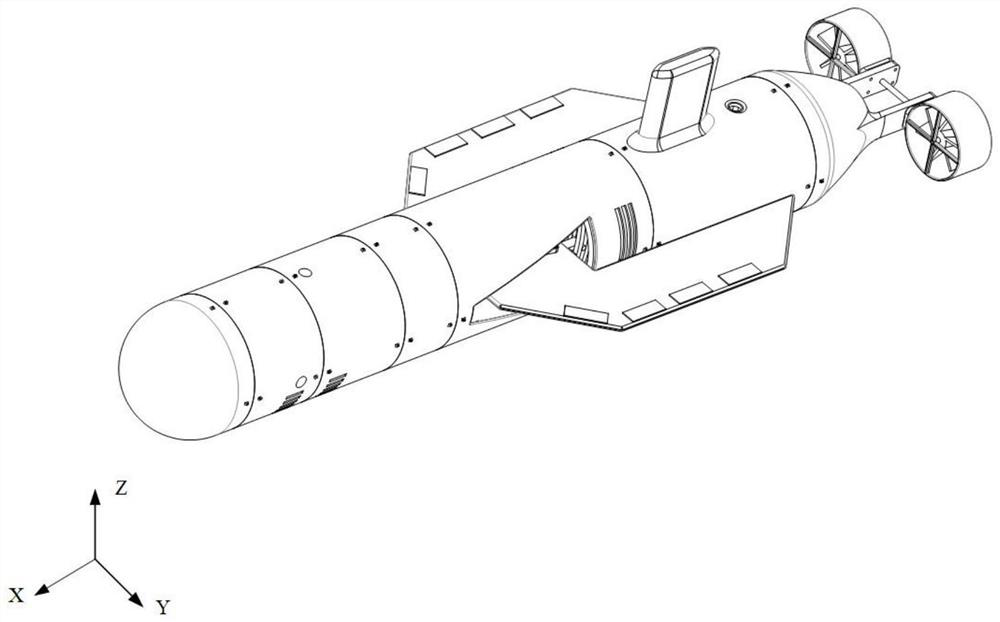
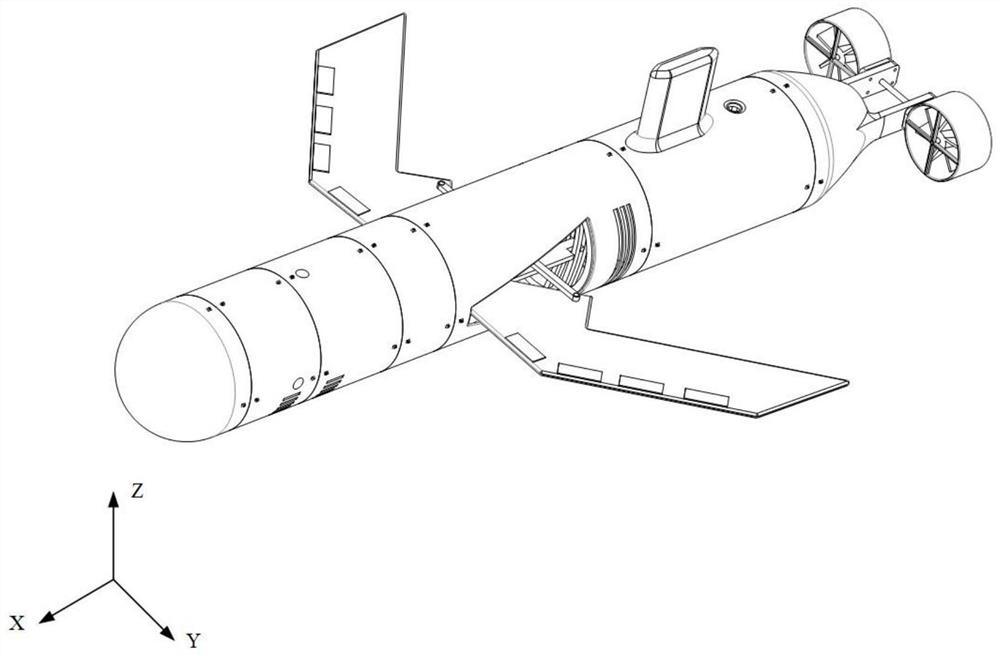
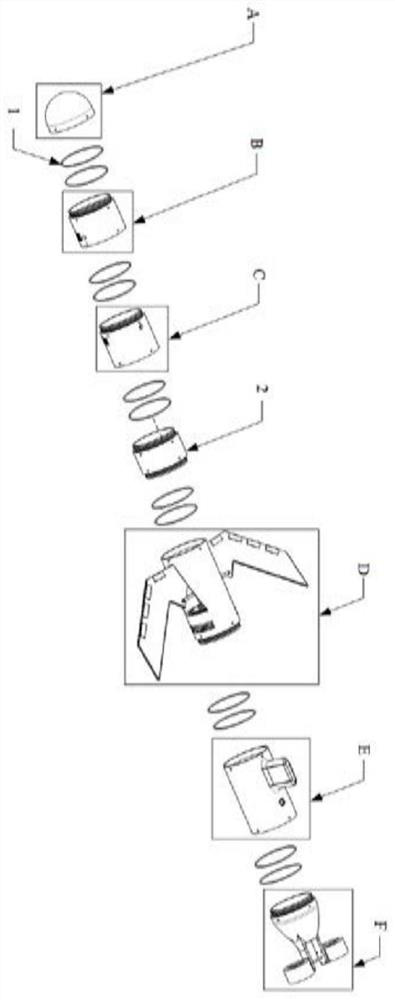
[0058] combine Figure 1-34 , the object of the present invention is to provide a multi-section combined and wingspan folding underwater robot, which is characterized in that: from front to back, it includes bow section A, left and right pump push section B, up and down pump push section C, counterweight section 2. The wingspan section D, the control section E and the propeller propulsion section F; among them, the rubber ring 1 is used to seal and waterproof the adjacent sections;
[0059] The above-mentioned bow section A includes a bow section shell 5, the bow section shell 5 is made of a transparent material, and a searchlight 3 and a camera 4 are installed inside;
[0060] The above-mentioned left and right pump push section B includes a left and right pump push section casing 7, which is provided with a left hole and a right hole...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More