

Wheel-tracked mobile robot based on Mecanum wheels
A mobile robot, wheel-tracking technology, applied in the field of mobile robots, can solve problems such as difficulty in moving in all directions, achieve excellent obstacle-surmounting and climbing functions, easy disassembly and maintenance, and simple structure.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
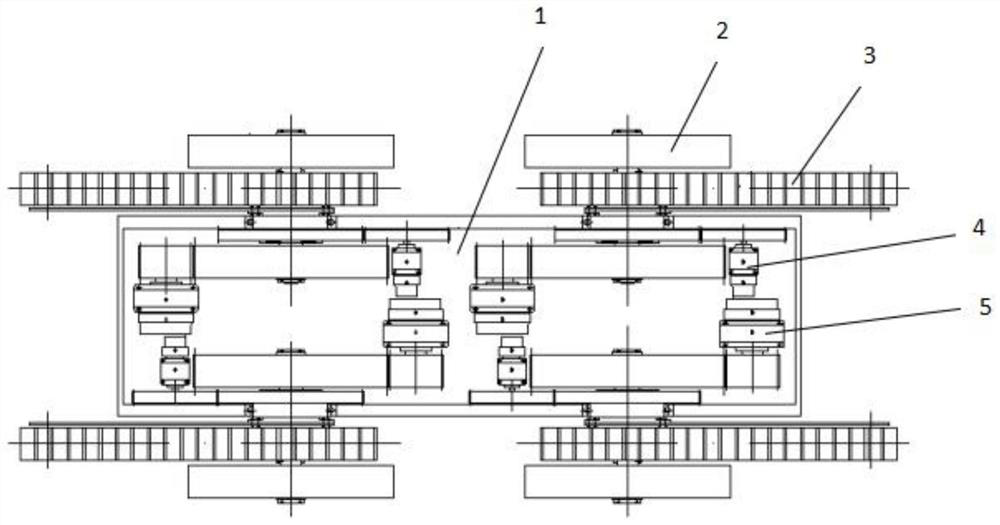
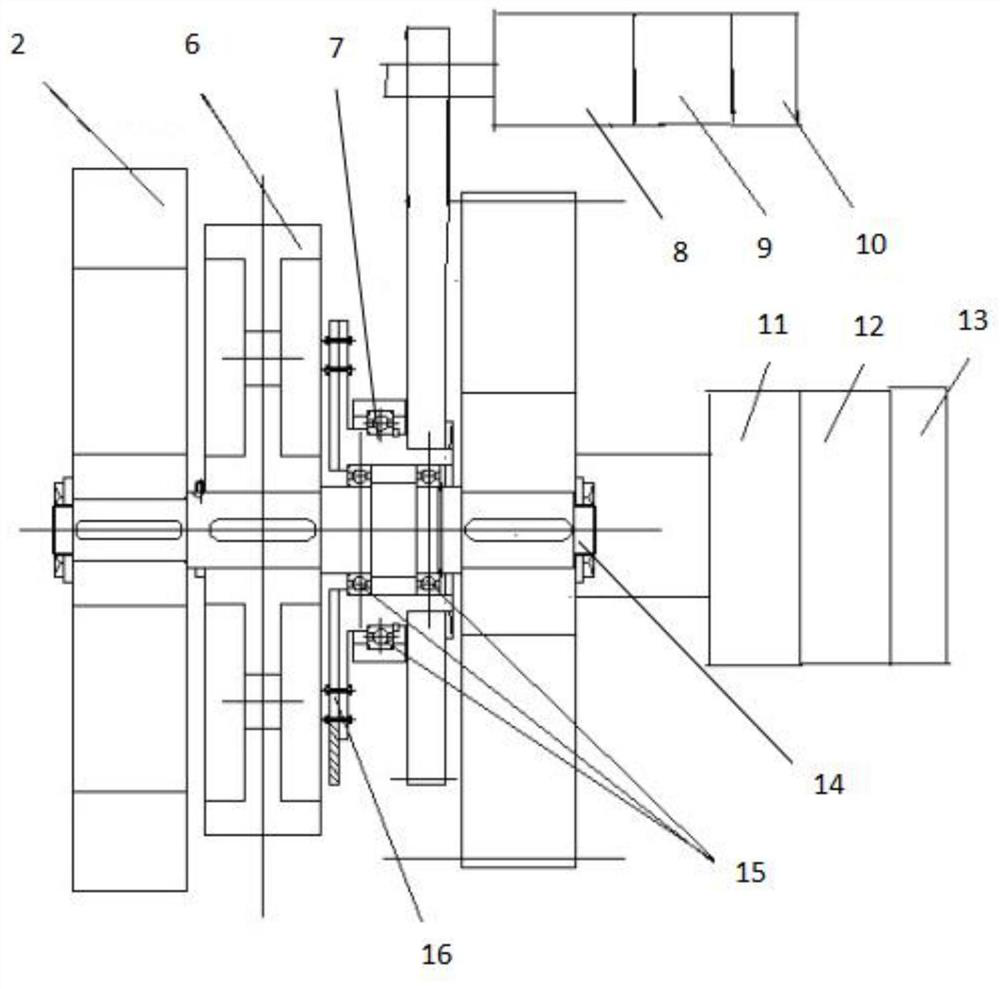
[0019] The basic structure of the mobile robot is four mecanum wheels, four crawler leg mechanisms, four drive motors, four crawler leg swing motors, car body, four pairs of gear transmission mechanisms, internal and external shaft transmission structures, and four sets of integrated planets. The gear reducer and the final cylindrical gear reduction pair transmission mechanism adopt a symmetrical structure. as attached figure 1 As shown, the four crawler legs 3 are installed inside the mecanum wheel 2; the mobile robot adopts a modular design, and each module is composed of the mecanum wheel 2, track legs 3, track leg driving mechanism 4, wheel track wheels The drive mechanism 5 is composed of; the crawler leg drive mechanism 4 is composed of a swing reducer 8, a swing drive motor 9, and a swing controller 10; the wheel track wheel drive mechanism 5 is composed of a main drive reducer 11, a main drive motor 12, and a main drive controller 13 Composition; the crawler leg drive...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More